WELKOM BIJ KARTAFSTELLEN.NL | ENSCHEDE
GEWICHT-VECTOR-TUNING
VOOR HET BALANCEREN VAN EEN KART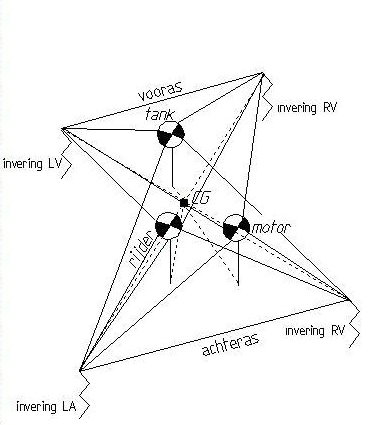
DEZE STAAN ZO SYMMETRISCH MOGELIJK ONDER INVALSHOEKEN.ZIE ONDERSTAAND VOORBEELD
SAMENSTELLINGSVECTOREN
VOOR HET VISUALISEREN V.D. VECTOR SYMMETRIE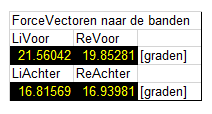
ForceVectorsToTires
SYMMETRIE | INVALSHOEKEN | LATERALE VERSNELLING
KART AFSTELLEN - SETUP - INLEIDING
Bij karting draait het om één ding en dat is snelheid.
Dit kun je in de bochten bereiken door maximalisering van de G-krachten,op de rechte lijn door maximalisering van versnelling en eindsnelheid.
Dit zijn de zaken die ik monitor, analyseer en in beeld breng met dit meetsysteem.
MAXIMALISERING G-KRACHTEN
Maximalisering van de G-krachten kun je bereiken d.m.v. optimalisering van de voetafdruk of in het geval van een kart de bandafdruk. We spreken hierna over de load op de betreffende band. Bij het afstellen van de kart is het belangrijk dat gewicht (massa) optimaal is verdeeld op de kart.
Een goede setup of afstelling van de kart moet dus zorg dragen dat niet alleen de voor- achterzijde in balans is maar ook de linker- rechterzijde moeten in balans zijn.
Deze links- rechts balans moet dusdanig zijn afgesteld dat de 4 banden in een optimaal werkvenster komen.
Optimalisatie van de balans vindt plaats m.b.v. VECTORANALYSE.
KART AFSTELLEN - SETUP - ACHTERGROND BANDENINDUSTRIE
Ook intern in autobanden (radiaal) kan een verschuiving (shift links<>rechts t.o.v de rijrichting) plaats vinden.
Deze waarde wordt bepaald aan de hand van spiegelsymmetrie tussen SideForceLevels te weten SFL_rechtsom en SFL_linksom van een rechtsom en linksom draaiende autoband, deze parameter heet CONICITEIT of CONICITY.
De correctie in het UNIFORMITY meetsysteem heet: CONBIAS
Ook op de kart gaat het ook om spiegelsymmetrie voor 3D LOAD verdeling tussen de linker- en rechter karthelft en in dit geval heet de correctie van de symmetrie-afwijking: mmCOGbias.
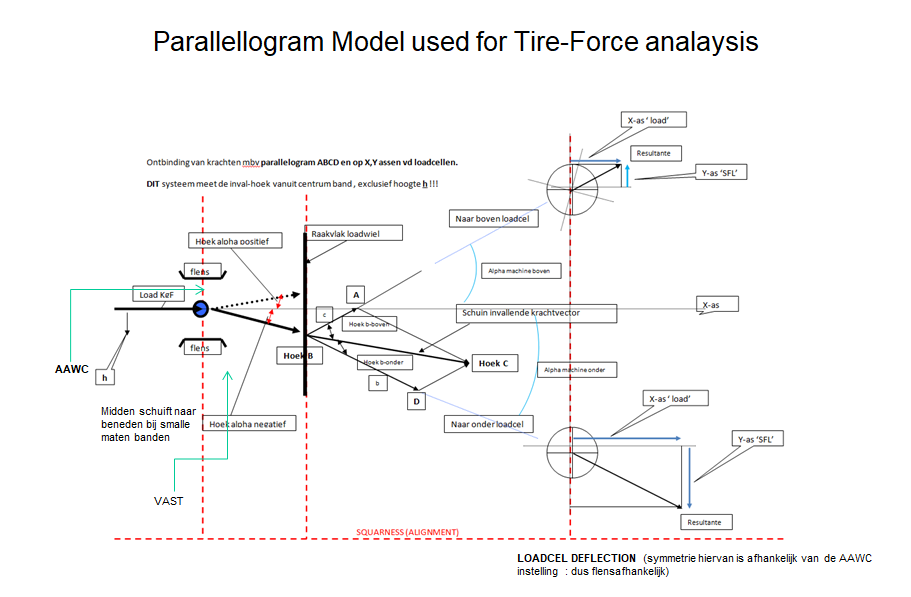
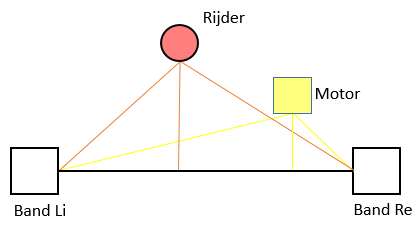
Tire Load SYMMETRISCH GESPLITST naar 2 opnemers
Voorbeeld van symmetrische opsplitsing van krachtvectoren
KART AFSTELLEN - VAN AUTOBAND TERUG NAAR DE SYMMETRIE V.D. KART
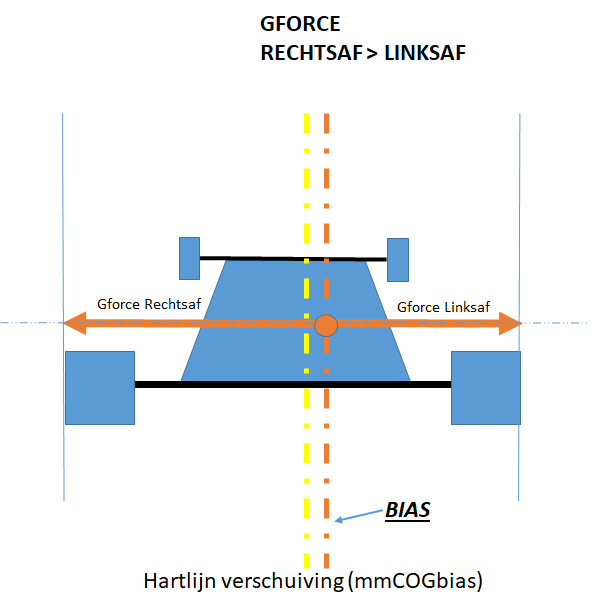
GFORCE-krachten op de banden LINKS KUNNEN ONGELIJK ZIJN met RECHTS
VEROORZAAKT DOOR EXTERNE FACTOREN
(1) BALANS LINKS # RECHTS
(2)CORRECTIE: DE BALANS BIAS (MMCOGBIAS)OOK HIERVOOR IS EEN OPLOSSING DEZE OPLOSSING HEET MMCOGBIAS EN IS DE CORRECTIE OP DE DELTA GFORCE TUSSEN RE-AF EN LI-AF GEREDEN BOCHTEN
RECHTER KOLOM MMCOGBIAS
TUNE DE ACHTERAS NAAR EXACT GEBALANCEERDE WAARDEN T.O.V. VAN HET [ZWAARTEPUNT= COG] VIA DE [MMCOGBIAS DATA]
Calculeer Trackbreedte Tb en zet max levels GFORCE op de
BANDEN
EN HIERONDER DE DYNAMISCHE OPTIMALISATIE AFSTELLING !!!!
KART AFSTELLEN - POSITIONEREN - GEWICHT
Het principe waar het om gaat bij het optimaliseren van de Gforce is niet alleen werken met statisch gewicht maar ook in combinatie met dynamisch krachten uit G-force.
De load is opgebouwd uit een deel de vaste aantrekkingskracht v.d. aarde (gravity) en uit een deel variabele centrifugaal krachten. Via de load distributie komen deze krachten (load) via bepaalde hoeken (vectoren) op de kartwielen.
Deze VECTOREN moeten voor een symmetrische afstelling gelijk zijn!
Dit maakt het verschil tussen statisch 2D en dynamisch 3D rekenen en afstellen.
We kennen hierdoor een:
Een [Gravity distribution center "2D"] en een [Gforce distribution center "3D"].
Met een SIMULATIE-REKEN-MODEL kunnen we de FORCE DISTRIBUTION naar de banden uitrekenen en via [mmCOGBIAS] in balans brengen voor ieder karakteristieke circuit layout.
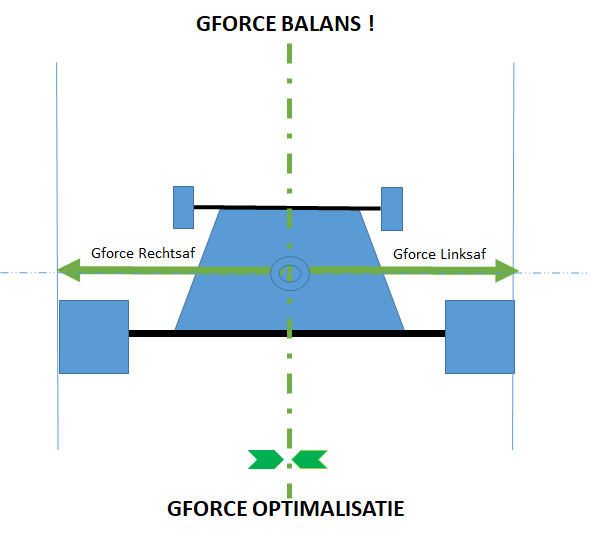
KART AFSTELLEN - SYMMETRY - VECTOREN LINKS RECHTS
Deze optimalisatie is nodig omdat: zodra de GFORCES gaan veranderen (variabel) door meer GRIP in de baan etc. en het feit dat de GRAVITY (vaste parameter) gelijk blijft.
Hierdoor gaan de de LOAD HOEK VECTOREN naar de banden ook veranderen en ontstaat er mogelijk ONBALANS in de LINKS RECHTS KRACHT VERDELING vanuit het COG PUNT !!!!!
KART AFSTELLEN - SYMMETRY - BALANS - CHECK
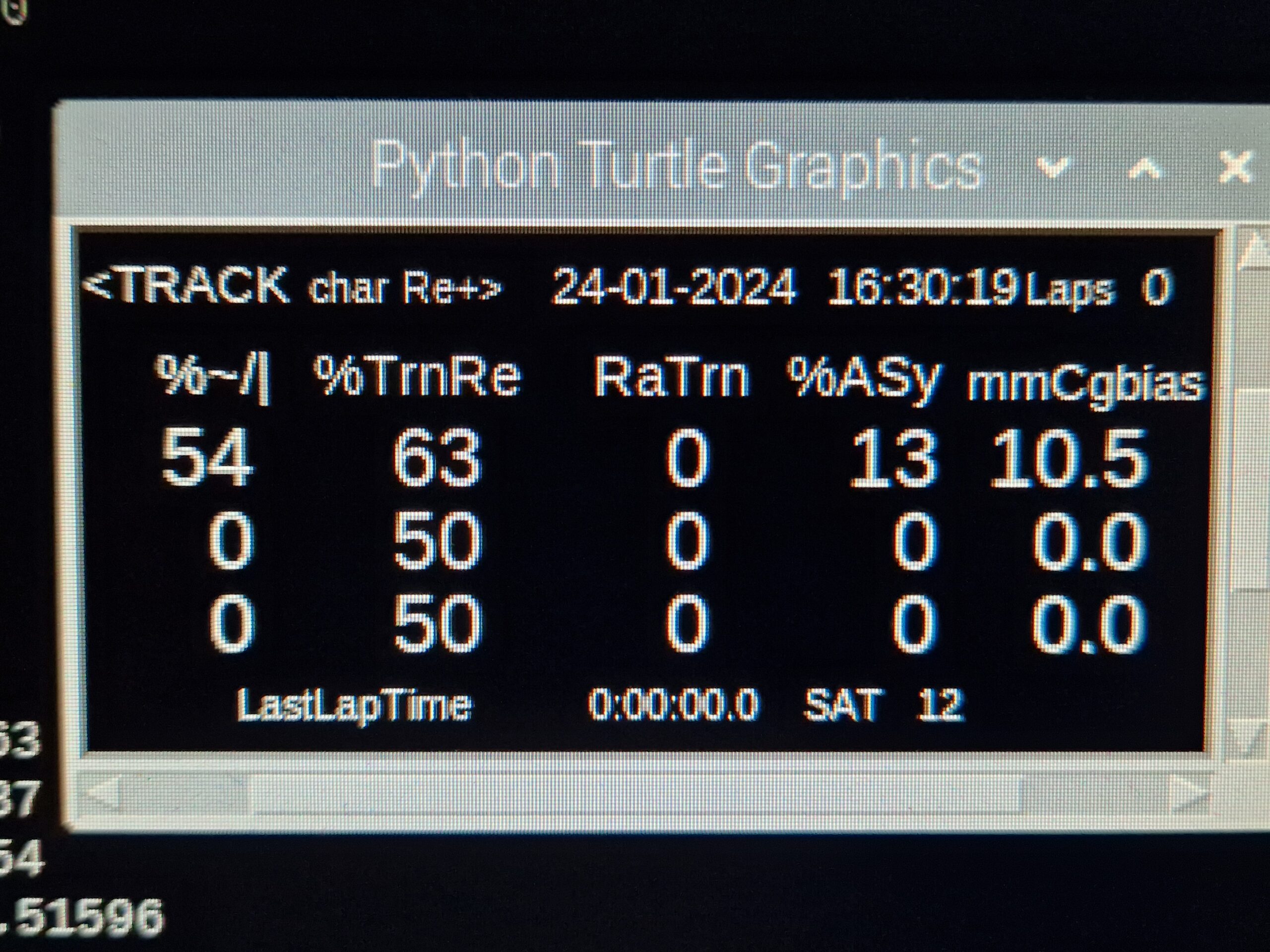
Met de on board: GFORCE TRACK BALANCE COMPUTER
MEET DE GFORCE VERDELING & DE TRACK LAYOUT
Symmetrie van de kart over 2D & 3D
Men spreekt van symmetrie bij een object als twee helften van het object in een bepaalde zin elkaars spiegelbeeld zijn.
Dit spiegelen kan ten opzichte van een punt, een lijn of een vlak zijn. In het spiegelen over de lengte-as is er bij een kart geen sprake van symmetrie behalve dat de kart qua gewicht uitgebalanceerd is. Dit is echter een 2D balans in werkelijkheid staan er 3D krachten op de kart
Deze 3D krachten zijn in grootte afhankelijk van de grip van de baan in samenspel met de kartbanden. De richting is gerelateerd aan de hoogteligging en de links rechts verdeling van alle massa.
De hieruit ontstane GFORCE VECTOREN worden onboard gemonitord en geanalyseerd. Vervolgens kan de kart afstelling met behulp van deze data worden geoptimaliseerd
MONITOREN - VERSNELLING - GPS - Raspberry Pi
De inline- en dwars-versnelling op [voor- achter- linker- rechterzijde] worden alle gemonitord met data van een GPS-systeem deze wordt geanalyseerd met behulp van een Raspberry Pi computer
GEWICHTS-TUNING
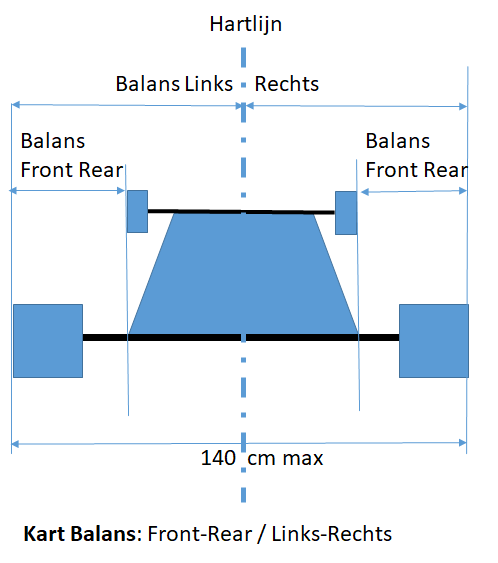
UITGAANDE VAN DYNAMISCHE BALANS TUSSEN MASSA EN 4X DE WIELAFDRUK
(1) BALANS FRONT-REAR(2) BALANS LINKS-RECHTS
IN DE BASIS:
ZIJN ER TWEE AFSTELLINGEN
VOOR HET BALANCEREN VAN EEN KART
DEZE BALANS KOMT VANUIT MASSAPUNTEN EN GAAT RICHTING DE WIELEN
WE GAAN GRIP ZOEKEN OF JUIST GRIP AFBOUWEN VOOR DE OPTIMALE BALANS V.D. KART
BIJ VERANDERING IN GRIPNIVEAU EN DUS OOK GFORCE KAN DE BALANS V.D. KART HIERDOOR VERANDEREN
LOAD MET EEN STEILE LOADHOEK ZAL SNELLER VERANDEREN DAN LOAD MET EEN KLEINERE HOEK!
INZICHTELIJK EN SNEL WORDT DE KART JUIST AFGESTELD MET BEHULP VAN HET SIMULATIE-MODEL DAT TE ZIEN IS OP PAGINA [KART GEWICHTSVERDELING]
DE AANWEZIGE MASSA OP DE KART LIGT GEOMETRISCH UIT HET MIDDEN
DE SAMENSTELLING MOET MOGELIJK EEN SYMMETRISCH CENTRUM (COG) OPLEVEREN.
DE KRACHTEN (GFORCES) MOETEN TEN ALLE TIJDE MET EXACT DE JUISTE HOEKEN OP DE BANDEN GERICHT STAAN!
PLAATS HET GEWICHT CQ MASSA COMPACT OP HET CENTER V.D. KART
AAN DE ZIJDE (RE OF LI) WAAR JE HET MEESTE VOORDEEL UIT DEZE GRIP KUNT HALENHIERONDER STAAN HIERVAN ENKELE VOORBEELDEN
DIT KAN HET BEST GEREALISEERD WORDEN VIA DE SPOORBREEDTE AAN LI EN RE ZIJDE V.D. KART NADAT DE KART EERST 100% SYMMETRISCH IS AFGESTELD (FASE 1) OP EEN GEMIDDELD G-FORCE NIVEAU
HET ZIJN VAAK EXTERNE FACTOREN DIE INVLOED HEBBEN OP DE VERDELING V.D. GFORCE & TYRE LOAD
DRIE VOORBEELDEN:
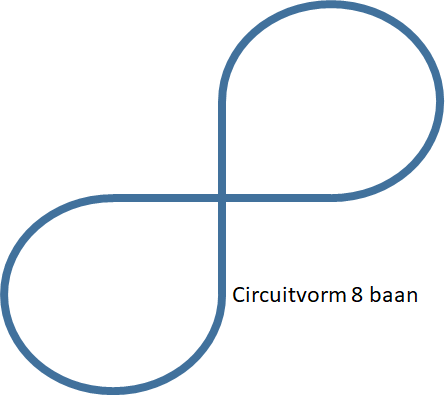
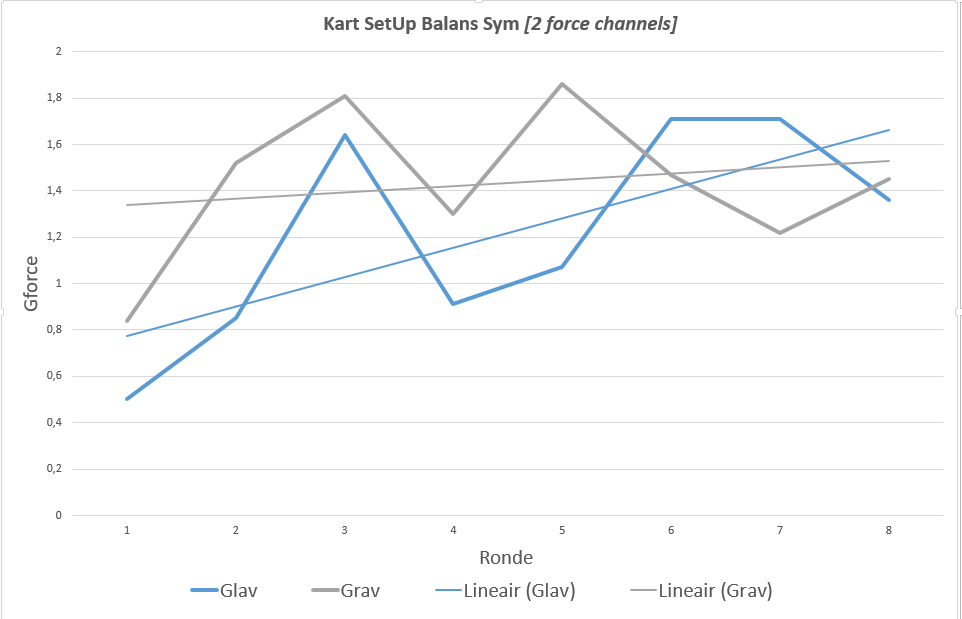
VOORBEELD_1 TRACK LAYOUT 8 BAAN:
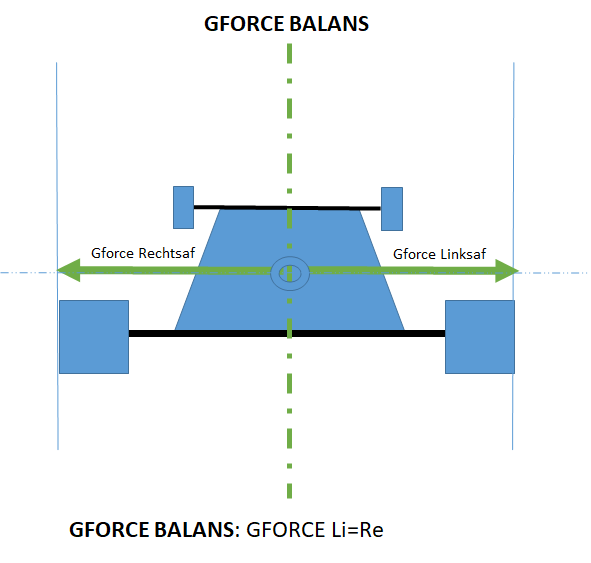
GFORCE SYMMETRISCH
GFORCE DYNAMISCH IN BALANS [LINKS=RECHTS]
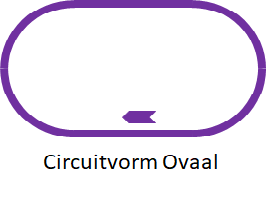
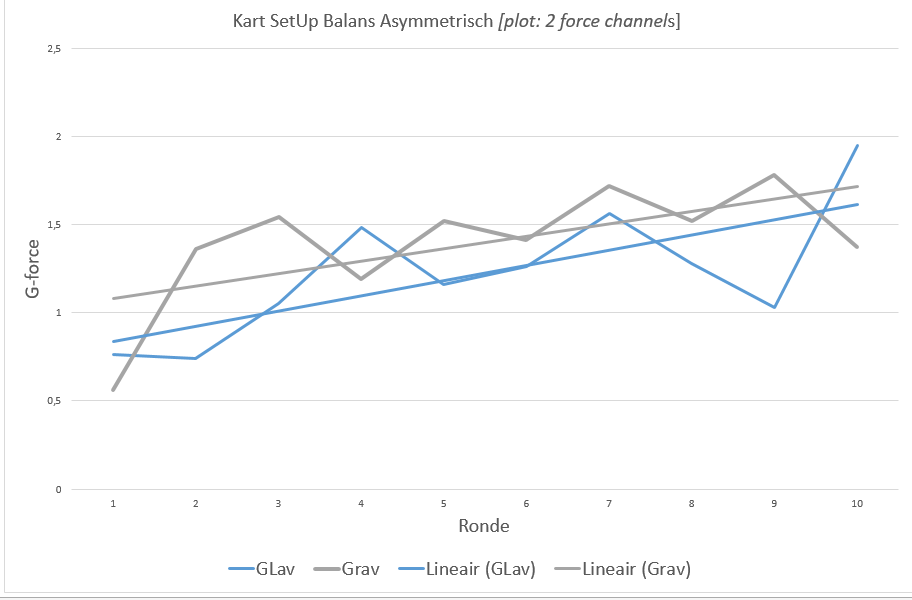
VOORBEELD_2 TRACK LAYOUT OVAAL:
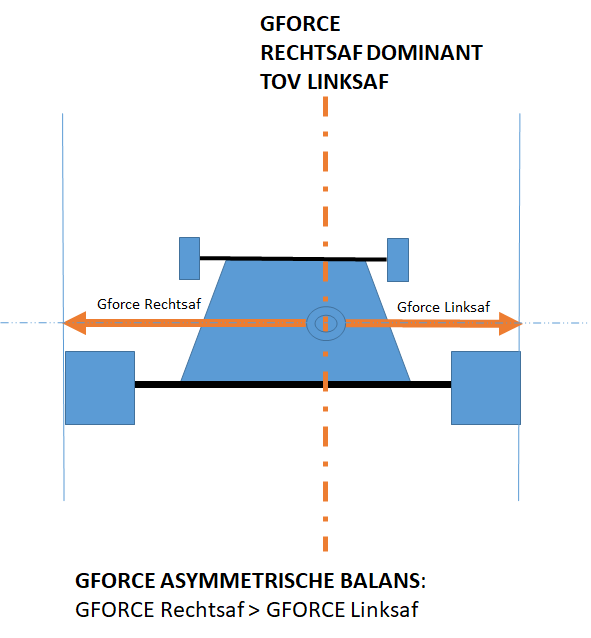
GFORCE ASYMMETRISCH
GFORCE DYNAMISCH NIET IN BALANS [LINKS#RECHTS]
KART AFSTELLING VOOR EEN SYMMETRISCH CIRCUIT:
GFORCE 100% DYNAMISCH IN BALANS [LINKS=RECHTS]
MASSA UITGEBALANCEERD OP HET SYMMETRISCH MIDDEN
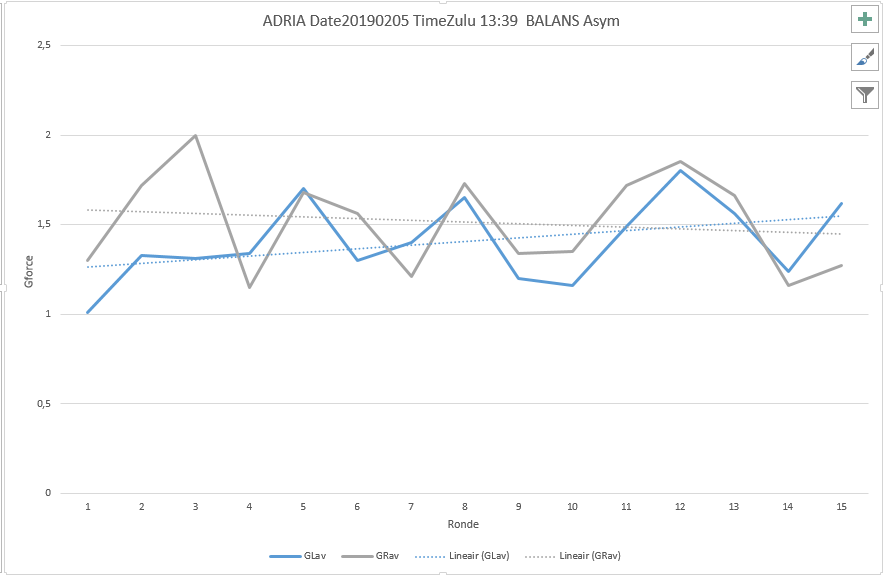
DEZE KART AFSTELLING IS ENKEL GESCHIKT VOOR EEN ASYMMETRISCH CIRCUIT (OVAL RACING):
ASYMMETRISCHE GFORCE BALANS [LINKS<>RECHTS]
GFORCE BALANCE MONITOR
GFORCE VERDELING & TRACK LAY OUT LIVE MONITORING OP DE KART
DE ON-BOARD COMPUTER OP DE KART GAAT VIA GEREGISTREERDE GFORCE EN TRACK LAYOUT DE OPTIMALISATIE V.D. KART AFSTELLING BEREKENEN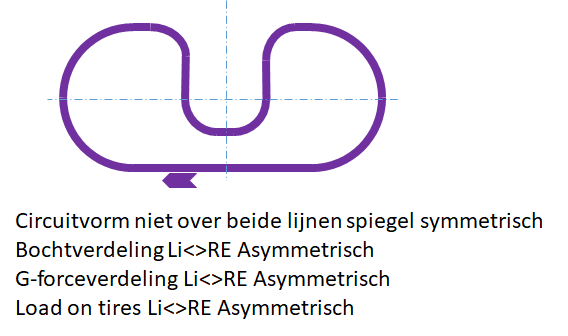
VOORBEELD TRACK LAY OUT:
ASYMMETRISCHE GFORCE VERDELING
EEN 100% GEBALANCEERDE KART OP EEN ASYMMETRISCH CIRCUIT IS GESCHIKT VOOR GFORCE OPTIMALISATIE:
(1) DOOR 100% SYMMETRIE IN DE EERSTE FASE
(2) DOOR G-FORCE CORRELATIE KART<>CIRCUIT IN DE TWEEDE FASE
FASE 1 = WEEGBRUG AANGEVULD MET SIMULATIE DATA UIT DE SIMULATIE TOOL
FASE 2 = MET DATA UIT LIVE RECORDING V.D. GFORCES OP HET CIRCUIT
WE VERVOLGEN MET DE RACE LIJNEN
ZIE ONDERSTAANDE VOORBEELDEN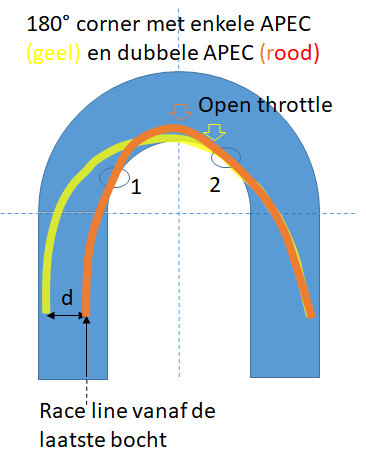
VOORBEELD_1: DE OPTIMALE RACELIJN IN 180 GRADEN BOCHTEN
ER ZIJN TWEE MOGELIJKHEDEN OM EEN HAIRPING CORNER EFFICIËNT TE RIJDEN(A) EEN LATE APEC TE RIJDEN (ZIE IN DE AFBEELDING DE GELE LIJN OOK WEL DE IDEALE LIJN GENOEMD) OF
(B) DE BOCHT IN EEN DUBBELE APEC_punt1,punt2 RIJDEN (ZIE IN DE AFBEELDING DE RODE LIJN OOK WEL DE VERDEDIGENDE LIJN GENOEMD)
1 BOCHT 2 CIRKEL-RADII
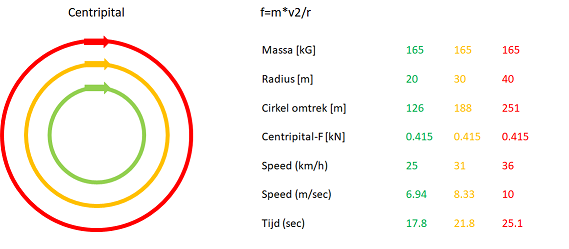
AFBEELDING MET BOCHTSNELHEDEN EN HUN THEORETISCHE DOORLOOPTIJD IN DIV CIRKEL-RADII
IN ALLE RADII IS DE BANDENGRIP IN BALANS MET DE CENTRIFUGAALKRACHTDE KLEINSTE CIRKEL MET DE LAAGSTE BOCHTSNELHEID IS DAN IN OMLOOPTIJD VOLGENS DE FYSICA FORMULES HET SNELST!!!
UITGANGSPUNT
RIJDT DE 180 GRADEN BOCHT ZO KOMPAKT MOGELIJK
Dit heeft te maken met de fysica in F=M*V^2/R
KRACHT=MASSA*SNELHEID^2/RADIUS
Stel force(max grip) en massa als constanten in de formule, houd dan variabelen: radius R zo klein mogelijk i.v.m. het kwadraat in in de variabele V (snelheid)
Normaal gesproken weegt de snelheidswinst op de grotere radius niet op tegen het aantal meters dat je meer rijdt t.o.v. de kleinere radius!!!
ForceVectorsToTires
HOEKEN VAN KRACHTVECTOREN OP DE BANDEN
Maak de kart meer "pointy" door de grotere kracht_vector_hoeken op de voorwielen toe te passen in de kart afstelling/ kart setupOOK DE KART_FRONT<>END GEWICHTSVERDELING EN DE MASSA COMPACTHEID IS BEPALEND VOOR OPTIMALISATIE V.D.DE MINIMALE RADIUS
ALS WE DE KART GAAN AFSTELLEN MOETEN WE DE MINIMALE RADIUS MEENEMEN:VERGELIJK DE "FRONT END" MET DE "REAR END VECTOREN"
(1)GEBRUIK HET KART SIMULATIE-PROGRAMMA(2)BEPAAL DE FRONT TO REAR BALANCE C.Q. THE DELTA FORCE VECTORSCONTROL" THE BALANCE" & "HOW LOOSE OR TIGHTEN IS THE HANDLING OF THE KART IN A SPECIFIED CORNER"
THE KARTING LINE
ZIE VOORBEELD 2
VOORBEELD_2: THE KARTING LINE IN 180 GRADEN BOCHTEN
DE BOCHT WORDT MET NADRUK ALTIJD OP EEN MAXIMAAL MOMENTUM GEREDEN (BANDENGRIP = IN BALANS MET DE CENTRIFUGAALKRACHT)VOOR CORNER EXIT ZIT JE ALTIJD ZO DICHT MOGELIJK AAN DE APEC !!!
UITGANGSPUNT
RIJDT HIER DE MINIMALE BOCHTRADIUS MET B.H.V. HIERVOOR GESCHIKTE MASSA VERDELING OP DE KART EN MEDE HIERDOOR DE JUISTE HANDLING KARAKTERISTIEKEN
VAN SYMMETRISCHE NAAR G-FORCE GEOPTIMALISEERDE KART AFSTELLING
HET IS OOK EEN GOED BEGIN OM DE KART ALS EERSTE SETUP 100% SYMMETRISCH AF TE STELLENVANUIT 100% SYMMETRISCHE- NAAR EEN IETS ASYMMETRISCHE AFSTELLING GAAN, INDIEN DIT VOORDEEL GAAT BIEDEN MET HET WERKVENSTER V.D. BANDEN EN HIERDOOR G-FORCE OPTIMALISATIE ONTSTAATLET OP !!!!
EEN KART HEEFT VANUIT HET ONTWERP EEN A-SYMMETRISCH GEWICHTSVERDELING BOVEN DE ACHTERASDIT KOMT OMDAT DE MOTOR EN DE RIJDER VERSCHILLENDE ZWAARTEPUNTEN BEZITTEN
DIT GELDT VOORNAMELIJK VOOR DE HOOGTEBALANS VAN DE CENTRALE-MASSAPUNTEN NAAR DE WIELEN
DE HOOGTE VAN DE ZWAARTEPUNTEN KUN JE NIET STATISCH VASTLEGGEN MET BEHULP VAN WEEGSCHALEN ONDER DE WIELEN (WEEGBRUG = 2 D)
DIT VEREIST EEN (SIMULATIE TOOL=3D)
AFHANKELIJK VAN DE CIRCUIT LAYOUT, GRIP EN VELE ANDERE FACTOREN MOET DE KART HIEROP WEL WORDEN GEOPTIMALISEERD
DIT PROCES WORDT EXACT IN BEELD GEBRACHT MET DE GPS-KART-ON-TRACK METING (GPS-GFORCE-BALANCE-MONITOR)
KIJK VOOR MEER INFO EN EEN INTERESSANT SIMULATIEVOORBEELD OVER DEZE TECHNIEK OP DE PAGINA [KART GEWICHTSVERDELING] VIA MENUBALK BOVEN
INLINE TRACTIE VOORWAARTSE VERSNELLING IN GFORCE EENHEDEN
INLINE TRACTIE VOORWAARTSE VERTRAGING IN GFORCE EENHEDEN
ZIJWAARTSE VERSNELLING LINKS IN GFORCE EENHEDEN
ZIJWAARTSE VERSNELLING RECHTS IN GFORCE EENHEDEN
BELAST=LOAD EN ONTLAST=UNLOAD DE BANDEN OP DE MEEST EFFICIËNTE WIJZE
TRENDLINE
360 GRADEN PLAATJE
OOK BESCHIKBAAR IS DE LAPTIMER VOOR HET RESULTAAT IN RONDETIJD
Als karter wil je (A) zoveel mogelijk grip, optimaal verdeelt over de banden, (B) een snelle motor, (C) veel remvermogen.
Om dit vast te leggen werk ik met een 3 stappen plan:
1 - Data vastleggen (recording)
2 - Data analyseren
3 - Data output (dwars-versnelling) gebruiken voor o.a. het balanceren v.d. kart en data (inline-versnelling / vertraging) voor het optimaliseren v.d. motor en remmen
De data die wordt vastgelegd is afkomstig uit een GPS-RECEIVER, er kunnen maximaal 10 SCANS per seconde geregistreerd worden (10 Hz)
Data-analyse vindt plaats in een RPI computer (autonoom), die met beeldscherm op de kart gemonteerd is
Je hoeft het systeem alleen maar aan te zetten, het systeem blijft hierna vol automatisch de kart volgen
Ook het circuit waarop de kart rijdt wordt automatisch herkend
Het is nogmaals gezegd belangrijk dat alle massa op het frame optimaal gepositioneerd is (vooral de hoogte van de massapunten is belangrijk) hierdoor ontstaat de juiste verdeling/instelling behorend bij het wedstrijdcircuit:
INLINE TRACTIE:
VOORWAARTSE VERSNELLING
VOORWAARTSE VERTRAGING
DWARSVERSNELLING:
LINKS / RECHTS verdeling (afhankelijk van [circuit vorm en grip] & de hoogte van de centrale massapunten boven de achteras)
HOOGTE / BREEDTE verhouding
OPTIMALISEERT GRIP-LEVEL tov KANTELMOMENT
AANVULLEND
BANDENDRUKKEN optimalisatie
CASTER optimalisatie
FRAME FLEX optimalisatie
GEEF IEDER WIEL DE JUISTE LOAD=DRUK PER WIEL met de juiste INVALSHOEK van de LOAD=RICHTINGSHOEK IN GRADEN VAN DE LOAD [KRACHT-VECTOREN] EN DE ABSOLUTE WAARDE IN KILOGRAM-FORCE [KGF]DOE DIT VOOR IEDER WILLEKEURIG CIRCUIT EN MET BIJBEHORENDE GRIP_OMSTANDIGHEDEN
Om de geometrie v.d kart efficiënt af te stellen op het circuit is het noodzakelijk dat de posities van massa of gewichtsdelen zich op de juiste en vooraf vastgelegde afstanden in zowel [lengte x breedte y hoogte z] ten opzichte van de wielen bevinden. De reden hiervan is dat geometrie van de TRACK waarover de kart rijdt ook vast ligt in hoeveel bochten linksaf, rechtsaf en hoeveel er in rechte lijn gereden wordt. We kunnen nu met behulp van de GEOMETRIE-DATA van de kart en de track, de VERTICAL-WHEEL-LOAD naar de banden uitrekenen. Het optimaliseren van de LI<>RE BALANS van de kart kan hierdoor zijn weg vinden met de actueel gemeten GFORCE data (feitelijk is dit de interactie tussen de kart en het circuit onder invloed van de aanwezige grip op dat moment) en is dus een belangrijk onderdeel in de performance optimalisatie van de kart.
VERSCHIL TUSSEN EEN G-FORCE GEOPTIMALISEERDE EN NIET G-FORCE GEOPTIMALISEERDE KARTAFSTELLING
GFORCE LINKS RECHTS AVERGE PER LAP
De waarde van deze [DELTA G-FORCE L<>R] moet bij de circuit-layout passen
Dit is na calculatie te controleren met het dynamisch balanssysteem in de board computer Het justeren vd kart-gewichtsbalans gebeurt met de [DELTA G-FORCE L<>R] value
GFORCE VIA GEOPTIMALISEERDE GEWICHTSVERDELING VERSUS GFORCE VIA STANDAARD GEWICHTSVERDELING HIER IN BEELD GEBRACHT
*LET OP !!! * DE GFORCE STANDAARD AFSTELLING komt alleen in lap 6 in BALANS
*Voor wat betreft balans is dit de minst presterende afstelling.DE ASYMMETRISCHE AFSTELLING PRESTEERT HIER DUIDELIJK BETER
FASE 1
STATISCH
KARTGEWICHT BALANCEREN OP DE WEEGBRUG
Kart Afstellen
Meerdere massadelen op de kart staan niet symmetrisch te opzichte van het center van de kart, om deze verdeling te optimaliseren is er een 3D SIMULATIE TOOL in het balanceerprogramma opgenomen. Dit balanceerprogramma heeft naast calculatie van de juiste load-verdeling boven de achteras ook een simulatie voor de load-verdeling boven de vooras. Zo is met behulp van simulatie al een load-balans te vinden over de 4 kartbanden, voordat de kart op het circuit (de track) staat.
PER DEFINITIE IS EEN KART NIET SPIEGEL SYMMETRISCH
DIT VEREIST EEN 3D KART AFSTELLING

KART AFSTELLEN OP HET HOOGSTE SETUP LEVEL
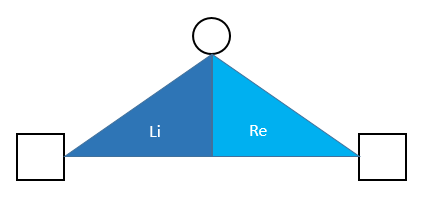
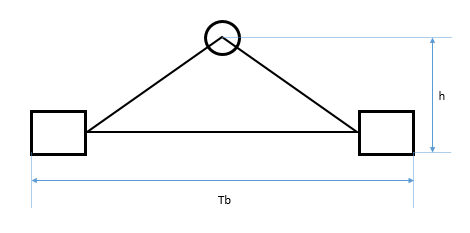
BALANS-DRIEHOEKEN CALCULATIE
De geometrie van driehoeken Li en Re zijn de basis voor dynamisch geoptimaliseerde kartafstelling
Het systeem maakt gebruik de afstelling van de best presterende driehoek (actueel samengesteld m.b.v. circuitdata van de boordcomputer) dit is de zijde van de kart met de meest optimale load transfer! [Dit ontstaat door het overzetten van de centrifugaal-krachten op de banden]
Welke driehoek (links of rechts) het beste functioneert hangt af van het gripniveau dat in de baan zit de lay-out van de baan en de actuele afstelling van de kart
FASE 2:
DYNAMISCH
DATA RECORDING IN THE ON-BOARD-COMPUTER
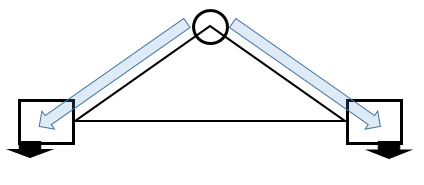
3D VECTOR BALANS
Calculation in the on-board-computer: magnitude & direction of the load vectors projected on the tyres
Je verdeeld via dit systeem de hoeveelheid (1) VERTICAL LOAD = RESULTEERD IN GRIP & (2) LATERAL LOAD= GFORCES L<>Re= RESULTEERD IN AFSCHUIFKRACHTEN (MINDER GRIP) naar de twee karthelften LI en RE wat resulteert in de meest EFFICIËNTE KARTAFSTELLING/ SETUP tijdens een wedstrijd!

DE KART AFGESTELD OP 3D VECTOR BALANCE

3D TYRE LOAD VECTORS

3D TYRE LOAD VECTORS
STAPPEN VOOR HET OPTIMAAL AFSTELLEN / SETUP V.D. KART
2D WEIGHT BALANCE
3D WHEEL_LOAD_VECTOR BALANCE
3D KART_ON_TRACK BALANCE
2D WEIGHT SETUP IS OOK IN DIT 3D SYSTEEM DE BASIS
GFORCE BALANCE MONITOR
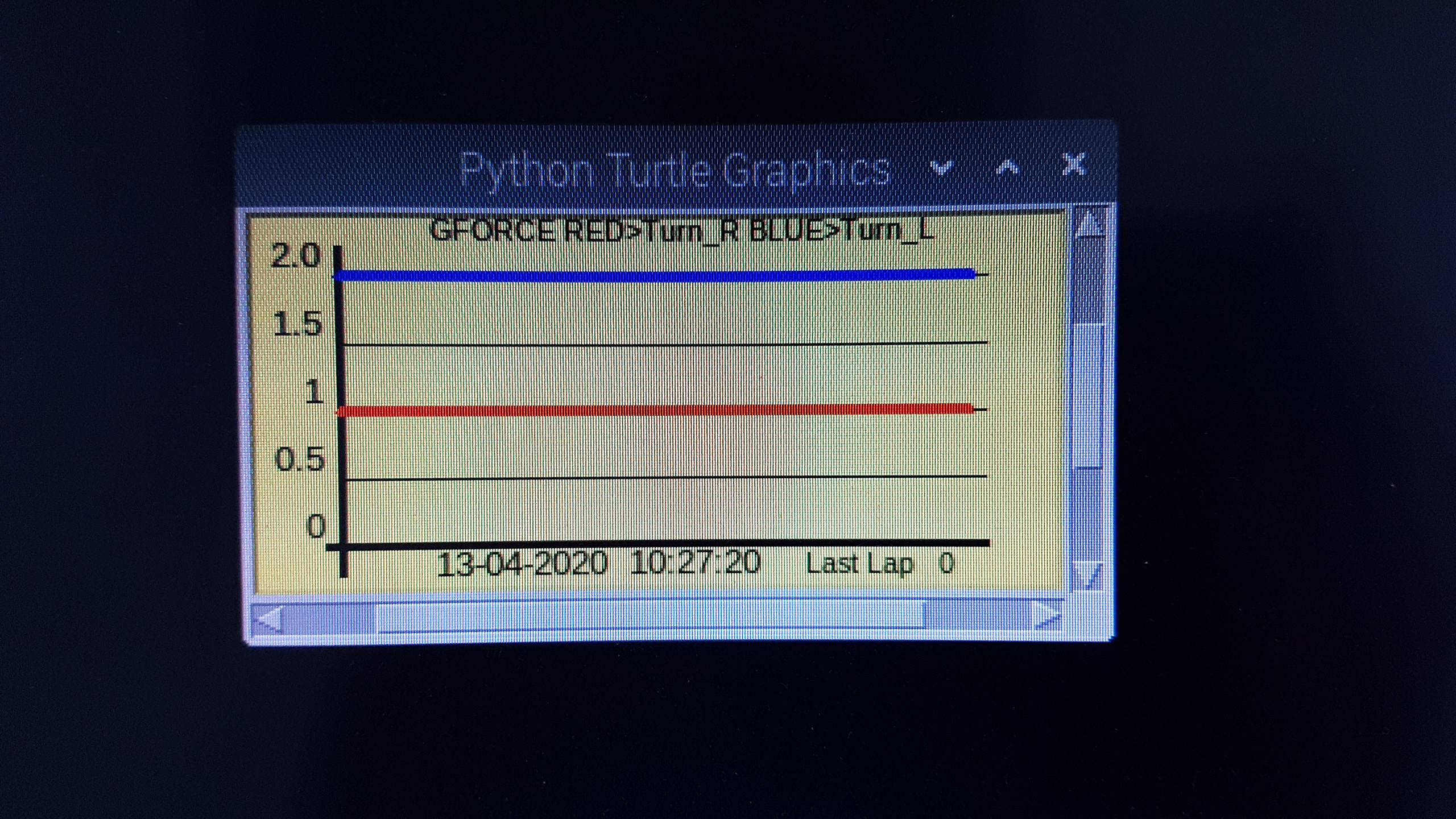
BALANCE TREND MONITOR
- DISPLAY: ROOD GFORCES RECHTSAF BOCHTEN | BLAUW GFORCES LINKSAF BOCHTEN
- DIT IS EEN REKENVOORBEELD
G-FORCES TO FRONT-REAR-LEFT-RIGHT DIRECTIONS
SPECIFICATIE MEETRICHTINGEN
GFORCES BALANCE [LEFT<>RIGHT]
GFORCES ACCELERATION [MOTOR POWER]GFORCES DECELERATION [BRAKING POWER]UITGANGSPUNT
DEZE TREND MONITOR MEET GFORCE OP ZOWEL LINKS ALS RECHTS GEREDEN BOCHTEN
DEZE WAARDE WORDT PER RONDE IN DE TREND-LINE GESCHREVENZO IS TEVENS TE ZIEN IN WELKE RONDE DE KART OPTIMAAL [IN BALANS] ISDEZE MEETDATA IS GEBASEERD OP GPS-DATA
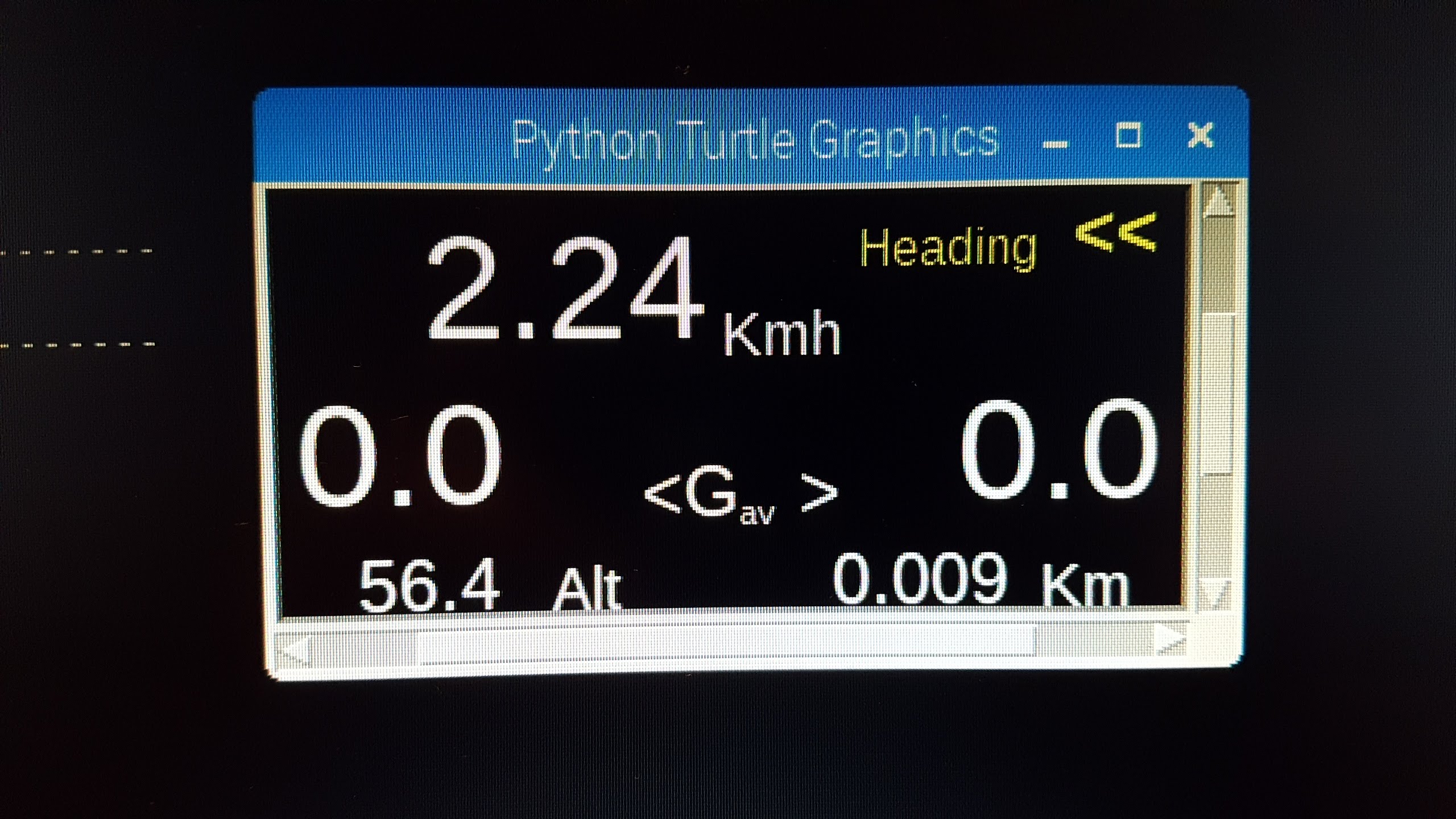
DISPLAY [IN G-FORCE BALANCE MODE]
LINKS <<>> KART HEADING TO | RIGHT | STRAIGHT | LEFT |
G-AVERAGE LI <<>> RE
ALTITUDE
TRACK DISTANCE
UITGANGSPUNT
MONITOREN VAN DE G-FORCE L<>R AFSTELLING
UITGANGSPUNT
MEET = WEET MIJN G-FORCE L<>R AFSTELLING
UITGANGSPUNT
BIJ OVERGRIP SITUATIE= CORRELATIE TUSSEN KART<>TRACK TOEPASSEN
RONDETIJD METING
GPS BASED LapTime CONTROLLER
CHRONO TIME = M.B.V. LAT_LONG COÖRDINATEN_FINISH
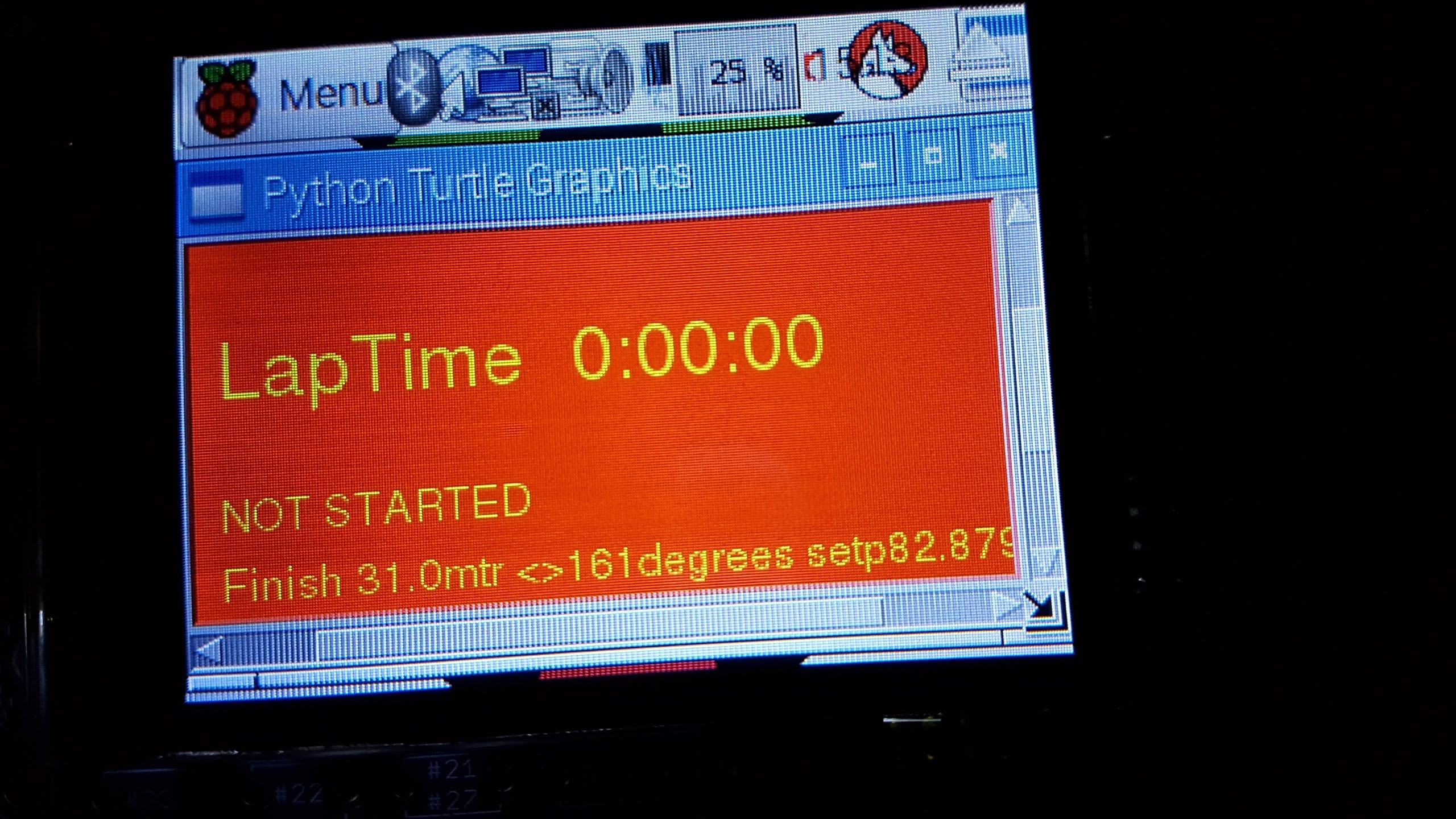
DISPLAY [IN LAPTIME MODE]
HET UITLIJNEN V.D. KART | ACHTERGRONDEN
DE TECHNIEK RONDOM HET ZWAARTEPUNT
De techniek op deze website werkt rondom het afstellen van de kart gerekend vanuit de 3D positie van het centrale zwaartepunt van de kart. Dit specifieke zwaartepunt wordt idealiter éénmalig wiskundig berekend door middel van weeggegevens van 4 weegschalen die exact waterpas staan uitgelijnd op een weegbrug. De individuele waarden die de 4 weegschalen aangeven moeten theoretisch overeenkomen met de sommatie van vectoren vanuit de massapunten naar de banden. De 4 wielen [inclusief de juiste banden-drukken] kunnen met deze methode in het horizontale vlak zeer nauwkeurig symmetrisch afgesteld worden. Bij een goede afstelling zal de energieverdeling (load) naar de 4 wielen optimaal zijn voor het rijden op symmetrische circuits waarbij als voorbeeld de meest zuivere vorm een 8-baan is. Voor A-symmetrische circuits wordt deze afstelling indien nodig verbeterd met een adaptieve afstelling. Dit heeft betrekking op de GFORCE-OPTIMALISATIE tussen linksaf en rechtsaf gereden bochten. Dit is dan de nieuwe circuit gerelateerde kart afstelling of setup voor uitlijning van het zwaartepunt. Hiervoor wordt per ronde integraal berekent welke GFORCE BALANS de TRACK kenmerkt ten opzichte van de LI<>RE-balans van de kart. M.b.v. deze data kan het systeem dan een herberekening uitvoeren op het centrale zwaartepunt van de kart. Dit punt wordt vaak het Center Of Gravity genoemd. De benodigde correctie t.o.v. de wielposities t.o.v. de hartlijn van de kart geeft de on board computer per ronde op het display.Dit is het Adaptive Weight Control [AWC] dat het zwaartepunt aanpast op het circuit voor verbetering van de LOAD VERDELING.
De kart staat dan optimaal in balans voor een specifieke TRACK.
ALS DE KART MET 100% GFORCE VERDELING RIJDT DAN CORRELEERT DE KART L<>R OP EEN SYMMETRISCH CIRCUIT MET DE FACTOR 1
* = de kart kan hierop worden aangepast door middel van het verschuiven (axiaal aantal MM) van de wielposities over de assen bij FACTOR <<1
TWEE BELANGRIJKSTE PARAMETERS
IN DE KART [L<>R BALANCE] AFSTELLING/ SETUP
100% SYMMETRISCHE 3D KART AFSTELLING
BIJ 100% GELIJKE LOAD VECTOREN !!!
3D_VECTOR_LOAD_TO_TYRE
TOTAL APPLIED WHEEL-LOAD [DIRECTION+MAGNITUDE] PER LAP ON L & R TYRES
UITGANGSPUNT
GFORCE BALANCE VERHOUDT ZICH LINEAIR T.O.V. DE TYRE LOAD*Binnen het tyre performance window gaan we sturen op (1) een laag zwaartepunt en een meer 100% symmetrische afstelling en (2) de minimale noodzakelijke load op de bocht binnenzijde achterwielen i.v.m. stabiliteit in het evenwichtsmomentum
GFORCE BALANCE VERHOUDT ZICH NIET LINEAIR T.O.V. DE TYRE LOAD*Onder low level grip omstandigheden
*Buiten het tyre performance window kan via GFORCE-BALANS de kartafstelling gecorrigeerd worden met b.h.v. de KART<>TRACK correlatie
MORE BALANCED TYRE HEAT ENERGY BUILD UP
MORE BALANCED TYRE TEMP.
UITGANGSPUNT
TEMPERATUUR KARTBANDEN BINNEN PERFORMANCE WINDOW HOUDEN
MORE BALANCED TYRE TEMP.
3D PLAATJE
UITGANGSPUNT
3D MODEL VECTOR-MODEL
IN WERKING MET:
PARAMETER_FORCE_GRAVITY
VARIABELE_GFORCE_LEFT
VARIABELE_GFORCE_RIGHT
BASIC RACE SETUP
UITLIJNEN VAN HET CENTRALE ZWAARTEPUNT - SETUP ACHTERGRONDEN
Het centrale zwaartepunt van de kart is het belangrijkste rekenpunt voor de balans. Alle afstellingen van de kart hebben betrekking op het centrale zwaartepunt. In de geometrie van de uitlijning moet vanuit dit punt worden gerekend. Het zwaartepunt kan hoog of laag liggen, maar ook ten aanzien van de hartlijn in lengterichting van de kart is er een optimale positie te vinden. Evenals de positie tussen de voor- en de achterwielen. Alle krachten vanuit de massa op de kart kunnen worden gerekend dat ze vanuit de het centrale zwaartepunt via de banden naar het asfalt lopen. Daarom is de spoorbreedte gerekend vanuit het centrale middelpunt voor de links rechts balans van de kart zo enorm belangrijk. Evenals de hoogte van het centrale middelpunt dat is voor de bite van de banden. Ik spreek hierbij dan van de: load to tire angle. De meetapparatuur die ik speciaal hiervoor heb ontwikkelt maakt gebruik van deze geometrische afleiding naar alle 4 kartwielen. Met de output-data kan de kart optimaal in balans gebracht worden

Voorbeeld van de uitlijning in de F1
BALLAST GEWICHT - IN HET CENTRALE ZWAARTEPUNT - SETUP ACHTERGRONDEN
Omdat het centrale zwaartepunt van de kart het belangrijkste rekenpunt voor de balans is. Zal deze positie tevens de beste locatie zijn voor de montage van eventueel ballastgewicht, omdat deze positie de massatraagheid van de kart niet onnodig verstoord. De response van de kart op insturen zal hierdoor optimaal blijven. Het simulatiesysteem kan de 3D positie voor het ballastgewicht exact uitrekenen,
DROOG | REGEN SETUP - HOOGTE | BREEDTE VERHOUDING - SETUP ACHTERGRONDEN
Belangrijk is bij een REGEN SETUP om de hoeveelheid neerwaartse load op de banden te maximaliseren bij minder eenheden GFORCE in vergelijking tot droog asfalt.
De kart wordt om deze reden achter op "SMAL" en voor op "BREED" en "HOGER" afgesteld.
Dit houd in dat zowel de hoeveelheid NEERWAARTSE LOAD op het buitenste achterwiel en binnenste voorwiel vergroot worden door:
(A) VOORZIJDE KART: door toename in de SCRUB RADIUS wordt de kart meer GELIFT wat een toename in de LOAD vanuit het CENTRALE ZWAARTEPUNT initieert
(B) ACHTERZIJDE KART: door afname van de tire-load-angle naar de achterbanden door smallere spoorbreedte en toegenomen hoogte neemt de hoeveelheid NEERWAARTSE LOAD gerekend vanuit het CENTRALE ZWAARTEPUNT hier ook toe.
Wanneer deze load-vectoren goed zijn doorgerekend vanuit de invalshoeken op de banden, is de kart opnieuw optimaal in balans met meer KGF LOAD neerwaarts gericht op de banden, wat perfect is voor de balans in een regen setup.
Ook CROSS WEIGHT kan hierin een ondersteunende rol spelen.
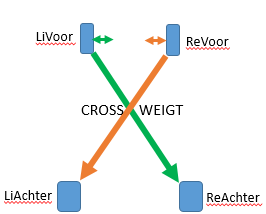
CROSS WEIGHT
DIT VERGROOT OF VERKLEINT TEVENS DE LOAD OP DE KRUISLINGS TEGENOVERLIGGENDE WIELPAREN EN IS DAAROM EEN BELANGRIJKE FACTOR BIJ HET AFSTELLEN VOOR DE UITEINDELIJKE SETUP, DIT IS ENORM VAN BELANG IN DE BOCHTEN
DENK AAN HET LOAD EN UN-LOAD PRINCIPE V.D. ACHTERAS ZONDER DIFFERENTIEEL
Dit is in kruisverband de ondersteuning van de gewichtsverdeling LI<>RE
CROSSWEIGHT kan ook ONGEWENST in de kart setup aanwezig zijn door:
- Niet symmetrische (2D) massaverdeling
-Verschil in band diameter op de kruislings gemonteerde banden
-Krom frame
WE SPREKEN HIER OVER EEN CONTINU AANWEZIG CROSSWEIGHT OOK WEL BIAS OF OFFSET WAARDE GENOEMD DE AFSTELLING VAN DE KART MOET IN DE BASIS CROSS 100% SYMMETRISCH ZIJN !!!
UITGANGSPUNT
DE GEOPTIMALISEERDE CROSS WEIGHT SET UP ONDERSTEUNT PRIMAIR VIA DE DIAGONALEN [L<>R] HET INSTUREN VD KART
OOK IS DE GFORCE VERDELING INZICHTELIJK NAAR DE KARTWIELEN VIA HET KART SIMULATIE-PROGRAMMA via menu [Kart-Gewichtsverdeling]
ON BOARD COMPUTER: GEDETAILLEERD
- ALLE KARTBEWEGING VANUIT: GPS LATITUDE,LONGITUDE COÖRDINATEN BEREKENEN
- Onderstaande GPS metingen max 10X per seconde uitvoeren
- GPS-DWARS VERSNELLING: berekening Gforces LI<>RE
- GPS-VOORWAARTSE VERSNELLING: berekening v.d. motor-prestaties
- GPS-VOORWAARTSE VERTRAGING: berekening v.d. rem-prestaties
- GPS-BEARING [registreert alle linksaf,rechtsaf beweging van de kart]
- GPS-CIRCUIT-LAYOUT via de latitude longitude coördinaten
- GPS-RONDETIJD: op doorkomst [FINISH positie-latitude-longitude coördinaten]
- BEREKENING: v.d. GFORCE L<>R BALANS
- BEREKENING GPS-SELECT-CORNERING: dit is een geselecteerde G-force bochtmeting inclusief de bocht radius meting, on-board registratie
- BEREKENING [COG]: OPTIMIZED Center of Gravity [COG] actueel per ronde op de boordcomputer
- BEREKENING CORRELATIE: tussen GEOMETRIE - KART - CIRCUIT actueel per ronde op de boordcomputer
- GRAFISCH DISPLAY: Hierop staan GFORCE BALANS DATA TRENDLIJNEN van GFORCE Li<>RE gepresenteerd
GFORCE BALANCE RESUMERD / SUMMARIZING
Ultimate kart-afstelling...
Het GPS-GFORCE-TRACK-BALANCE-SYSTEM is ontworpen om een kart snel te balanceren m.b.v. circuit-data-records
Ultimate kart adjustment...
This GPS-GFORCE-TRACK-BALANCE-SYSTEM is designed to quickly balance a kart by using circuit data records
Under high level conditions the setting range is limited to a setting of exactly 140/2 =70cm (=symmetrical) per half of the kart. Adjust here to 100% symmetrical, with a lowered center of gravity if possible!
VERY FAST GPS RECEIVER: GEDETAILLEERD
- 10 GPS-MEASUREMENTS per second
- 3 DIMENSIONAL GPS-MEASUREMENTS
- MULTI OUTPUT GPS DEVICE
- CONNECTED to the GPS-GFORCE-TRACK-BALANCE-COMPUTER
GPS-GFORCE-TRACK-[L<>R BALANCE]-COMPUTER










SCREENSHOTS presentation -> Circuit -> LapTime -> Compass -> Speed -> Gforce -> Lap data -> Gforce left_right -> GEOMETRIE-TRACK info -> Selected Corner(s) GForce -> Monitor build on the kart
Technology

Driving and circuit-data logging

Analysing static and dynamic data

Classification of mass on the kart including adjustment of tyre pressures

Integral increase G-forces
More speed Better results
Bring G-force
to a higher level
By tuning the balance of your kart to the characteristics of a given circuit