
KART TECHNIEK - GFORCE BALANS - WEIGHT DISTRIBUTION - CENTER OF GRAVITY
WELKOM BIJ KARTAFSTELLEN.NL | ENSCHEDE
GEWICHT OP DE KART DRAAGT ZORG VOOR:LOAD OP DE BANDEN EN HIERUIT RESULTEERT VERVOLGENS WEER GRIP!
JUISTE GEWICHTSVERDELING EN INSTELLINGEN OP DE KART DRAGEN ZORG VOOR:BALANS
EXTERNE FACTOREN VEROORZAKEN MOGELIJK:ONBALANS IN DE KART AFSTELLING OF SETUP
DEZE EXTERNE FACTOREN KUNNEN WORDEN GECOMPENSEERD MET: BIAS CORRECTIE OP HET CENTRALE GEWICHTSCENTRUM [COG]
VOLG DE TECHNIEK VAN: MAXIMALISEREN G-KRACHTEN PER LAP
HIERUIT ONTSTAAT: CENTRIFUGALE BALANS OVER ALLE LINKSAF & RECHTSAF BOCHT COMBINATIES PER LAP
HIERDOOR IS CORRELATIE MOGELIJK: GFORCEBALANS MET GEWICHTSBALANS PER LAP
Vanuit deze eenheden gaan de algoritmes terugrekenen naar de SetUp en de balans van de kart afstelling, onder invloed v.d. trackbreedte en de hoogte van de massapunten.
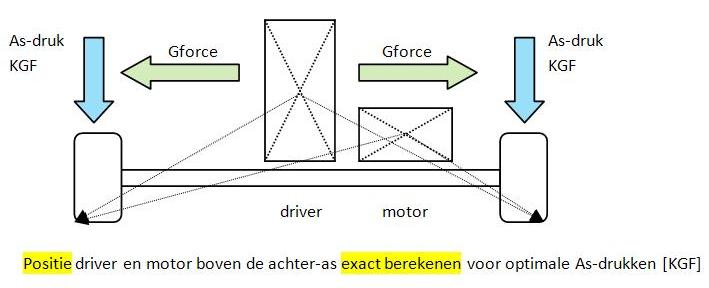
Belangrijke geometrie eigenschappen t.a.v. symmetrie bij een kart
- De positie van de individuele massadelen boven de achteras zijn afhankelijk van het kartontwerp, deze zijn asymmetrisch verdeeld t.o.v. de achterwielen
- Ook de hoogtepositionering van de individuele massadelen ligt asymmetrisch t.o.v. de achterwielen
- De samenstellingsvectoren, dit zijn de vectoren van alle massadelen opgeteld, moeten altijd exact symmetrisch zijn t.o.v. de achterwielen
- Stel de kart in de BASIS altijd SYMMETRISCH af met behulp van een VECTOR SIMULATIE TOOL!
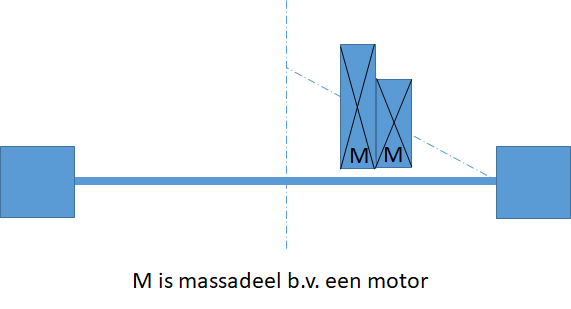
Dit is een voorbeeld van fine tuning.
Plaatsing van hoge en lage massapunten boven de achteras met inachtname van dezelfde loadhoek.
Hierbij kan gedacht worden na het wisselen naar een zwaarder type motor (gewicht in KGF), met een wat hoger zwaartepunt(positie Z-as).
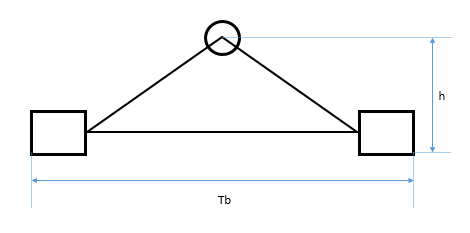
Parameters h en Tb
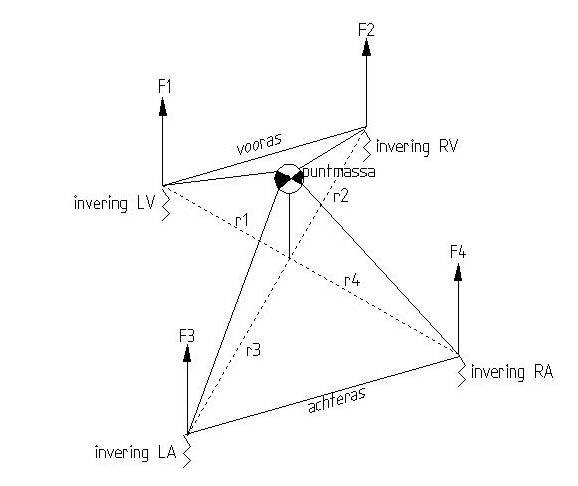
DRIEHOEKEN
Via bovenstaande samenstelling van de aanwezige massa gaat de gps-gforce-track-balance-computer de MEEST EFFICIËNTE BALANS op de achteras on-board uitrekenen tijdens het rijden op een circuit. Deze berekeningen zijn inherent aan hoogte h en de trackbreedte Tb.
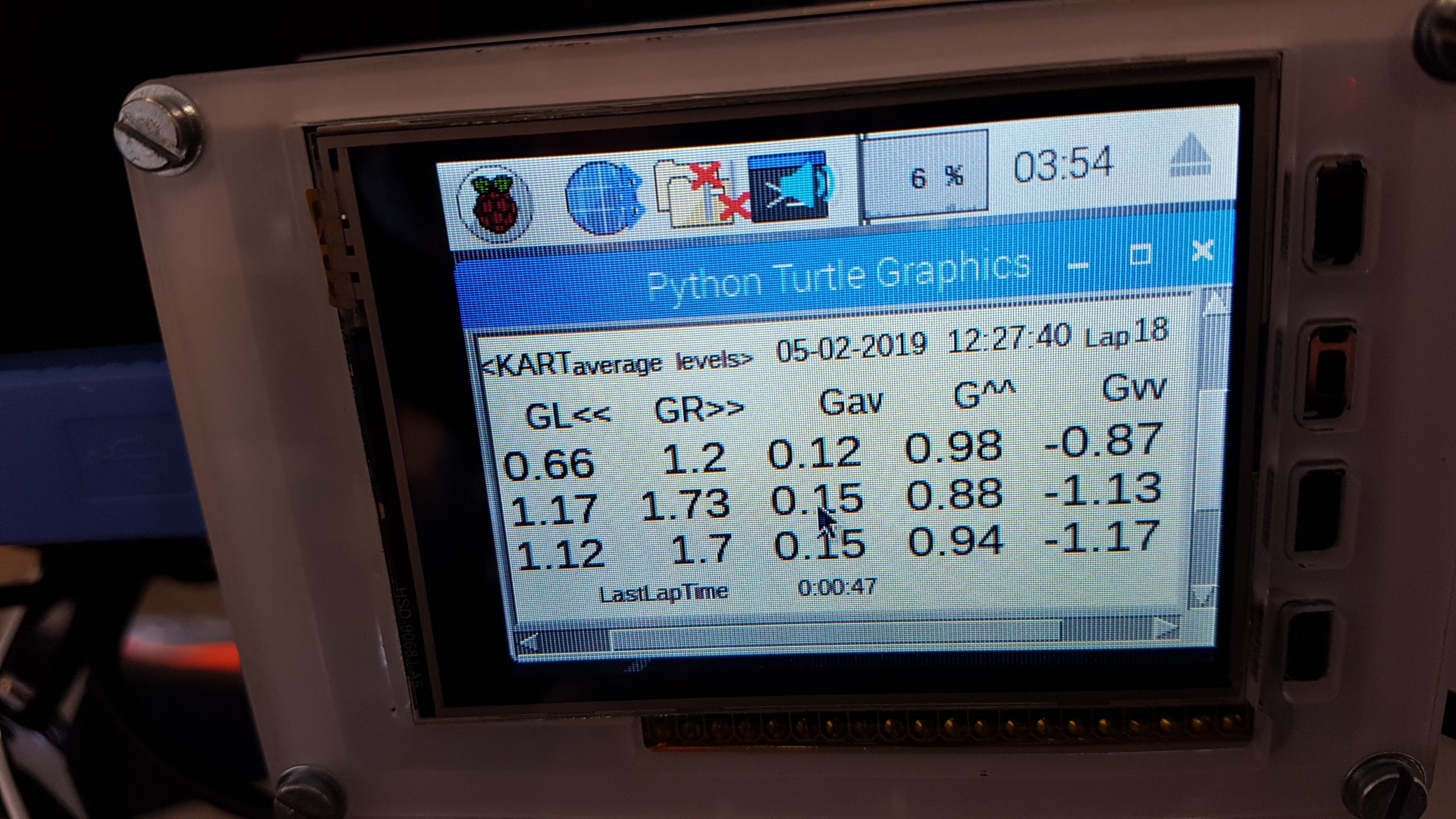
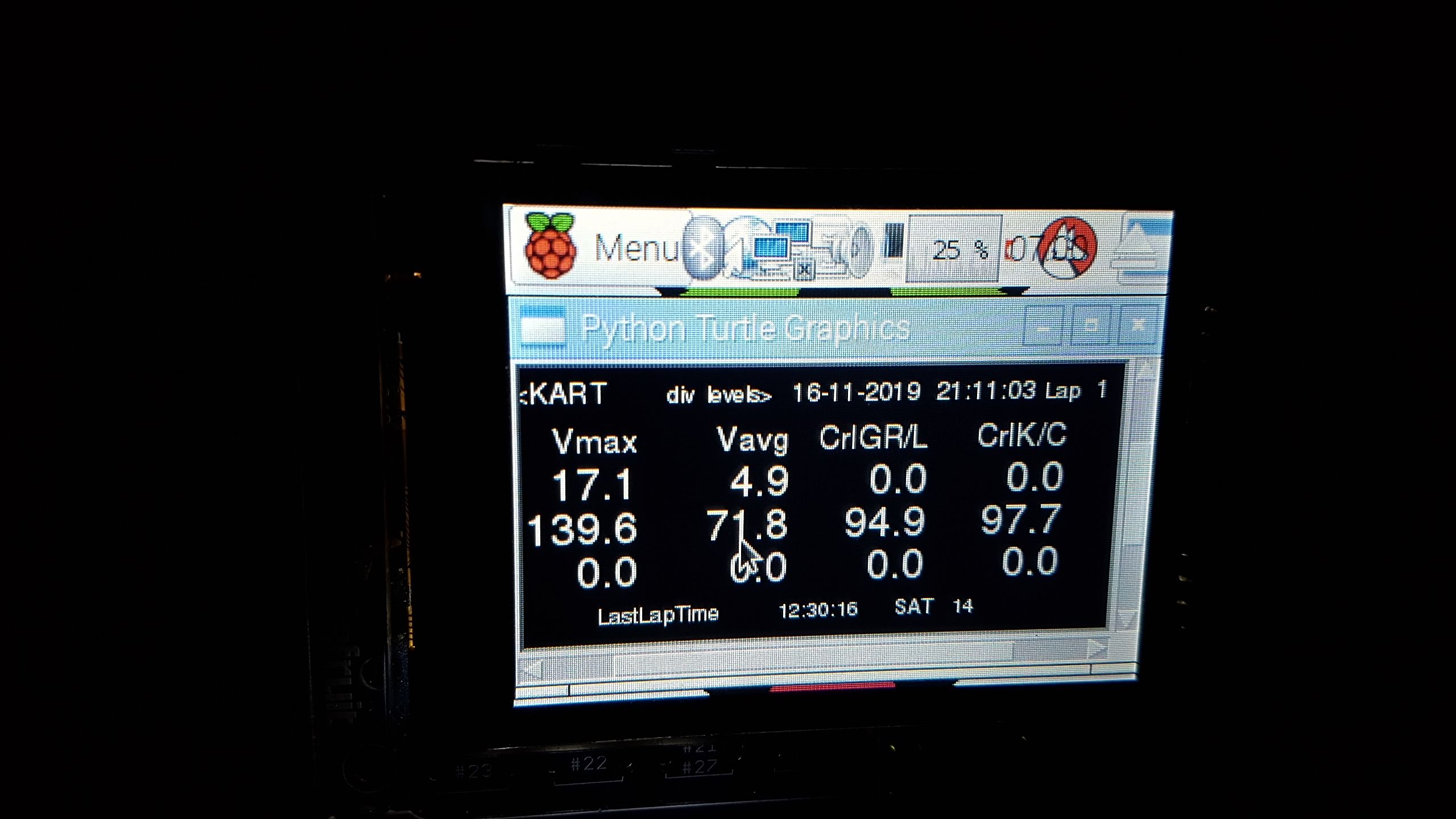
MONITORING
Monitoren van het VERSCHIL = DELTA GFORCE dat zich bevindt tussen linksaf en rechtsaf gereden bochten iedere 1/10 secDit is te zien op het display dat hierboven is afgebeeld
*Dit is een live-recording vastgelegd op het kartcircuit Adria
ADAPTIVE LI<>RE GFORCE CONTROL
DE GRIP V.D. KART BLIJKT ONDER INVLOED VAN EXTERNE FACTORENN (BIAS) NIET ALTIJD SYMMETRISCH
Karts die 100% symmetrisch zijn afgesteld blijken op het circuit vaak niet symmetrische G-krachten te ontwikkelenTHERMISCHE EIGENSCHAP VD KARTBANDEN GEEFT EEN BALANS VERSCHUIVING
Dit gps meetsysteem geeft dus het VERSCHIL = DELTA GFORCE weer van de dwarsversnelling liaf / reaf
Hieruit blijkt dat de GFORCE-BALANS-LI-RE tijdens het verloop van wedstrijden op circuits met Asymmetrische lay-outs geïnverteerd (invers) kan veranderen
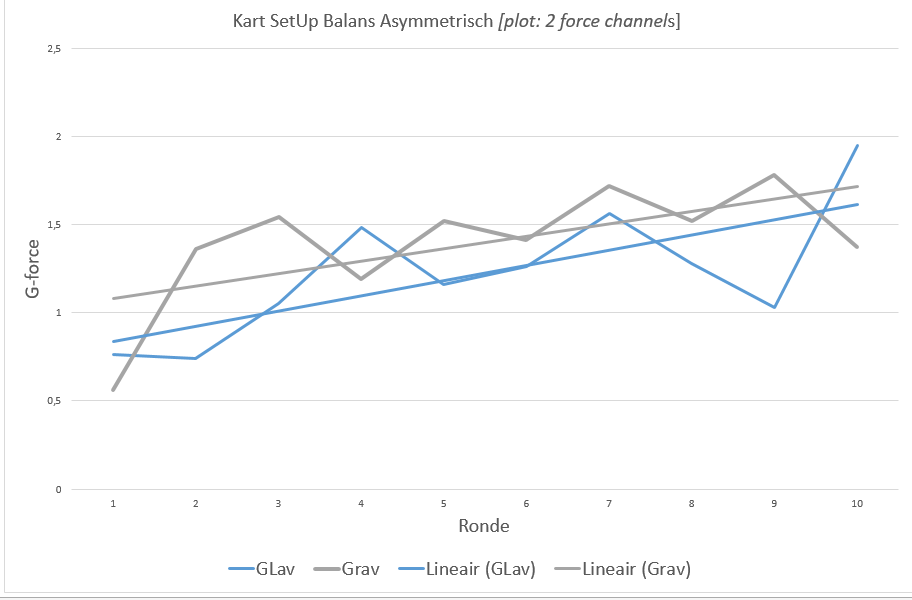
Waardoor een bepaalde kart afstelling met koude banden (lower level of grip) minder efficiënt wordt bij warme banden (higher level of grip) nadat er meerdere ronden gereden zijn. Bij grafiek 1 is dit na 7 rondjes.
DE CRUX
De crux bevindt zich in de HOEVEELHEID zijwaartse LOAD TRANSFER richting de kartbanden die niet symmetrisch verdeeld wordt, dit resulteert vervolgens in een waarde [DELTA G-FORCE L<>R]
Deze waarde is aan te passen door de BREEDTE/HOOGTE verhouding van het centrale zwaartepunt op te splitsen naar twee achterwielen en vervolgens per karthelft te optimaliseren.
Dit aanpassen wordt mogelijk met een rolmoment_evenwicht_algoritme in de boordcomputer dat doorlopend deze waarde ON-TRACK uitrekent. De FRAMEFLEX op LI<>RE karthelft wordt tevens aangepast aan de omstandigheden, inherent aan de GRIP per karthelft LI<>RE
SYMMETRICAL VERSUS A-SYMMETRICAL
De techniek tot HERVERDELING van de LOAD staan met puntmassa voorbeelden in onderstaande tekeningen 1 t/m 3 afgebeeld. Tevens staan de daadwerkelijke gemeten waarden zoals deze op het circuit zijn gereden, in de grafieken onder punt 4
1 - 100% SYMMETRICAL 2D=3D
KART IN STATIC STATE
KART LOAD TRANSFER IN BALANCE
Met de kart stilstaand op de WEEGBRUG
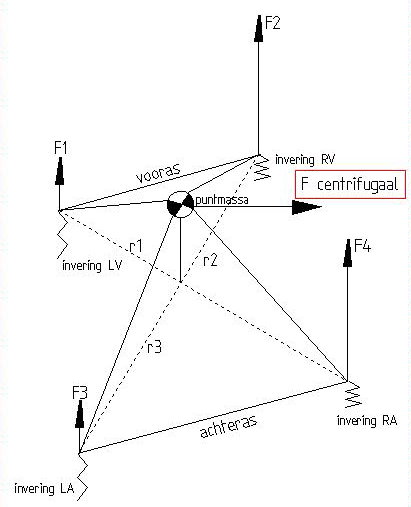
2 - NOT 100% SYMMETRICAL 2D#3D
KART IN DYNAMIC STATE
KART LOAD TRANSFER NOT 100% IN BALANCE
Met de kart rijdend in li-af bochten onstaan centrifugale krachten
Voor de kart rijdend in re-af bochten geld invers hetzelfde waardoor in principe de kart geoptimaliseerd is voor een symmetrische gewichtsverdeling8 baan met evenveel bochten links- als rechtsaf.
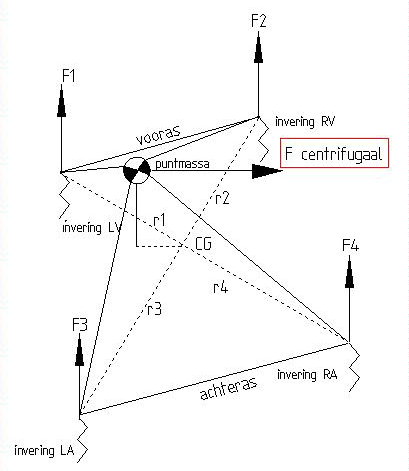
3 - A-SYMMETRICAL
KART IN DYNAMIC STATE
KART LOADTRANSFER OPTIMIZED BALANCED
Met de kart rijdend in li-af bocht met weight-bias
Deze afstelling werkt optimaal op hoofdzakelijk li-om gereden circuits.
Bij re-om gereden circuits ligt de bias precies gespiegeld.
Bij combinaties hiervan rekent de KART-TRACK-BALANCE computer deze waarde om naar vectoren richting 100% SYMMETRISCHE TIRE-LOAD en richting 100% G-FORCE BALANS.
4 - FINETUNING en CONTROLE van de kart met de GPS based onboard computer
4 - GPS-GFORCE-TRACK-[L<>R BALANCE]-COMPUTER
SOME OUTPUT RESULTS
(B) %CORRELATIE tussen GFORCE LI< >RE
(C) %CORRELATIE tussen KART & CIRCUIT
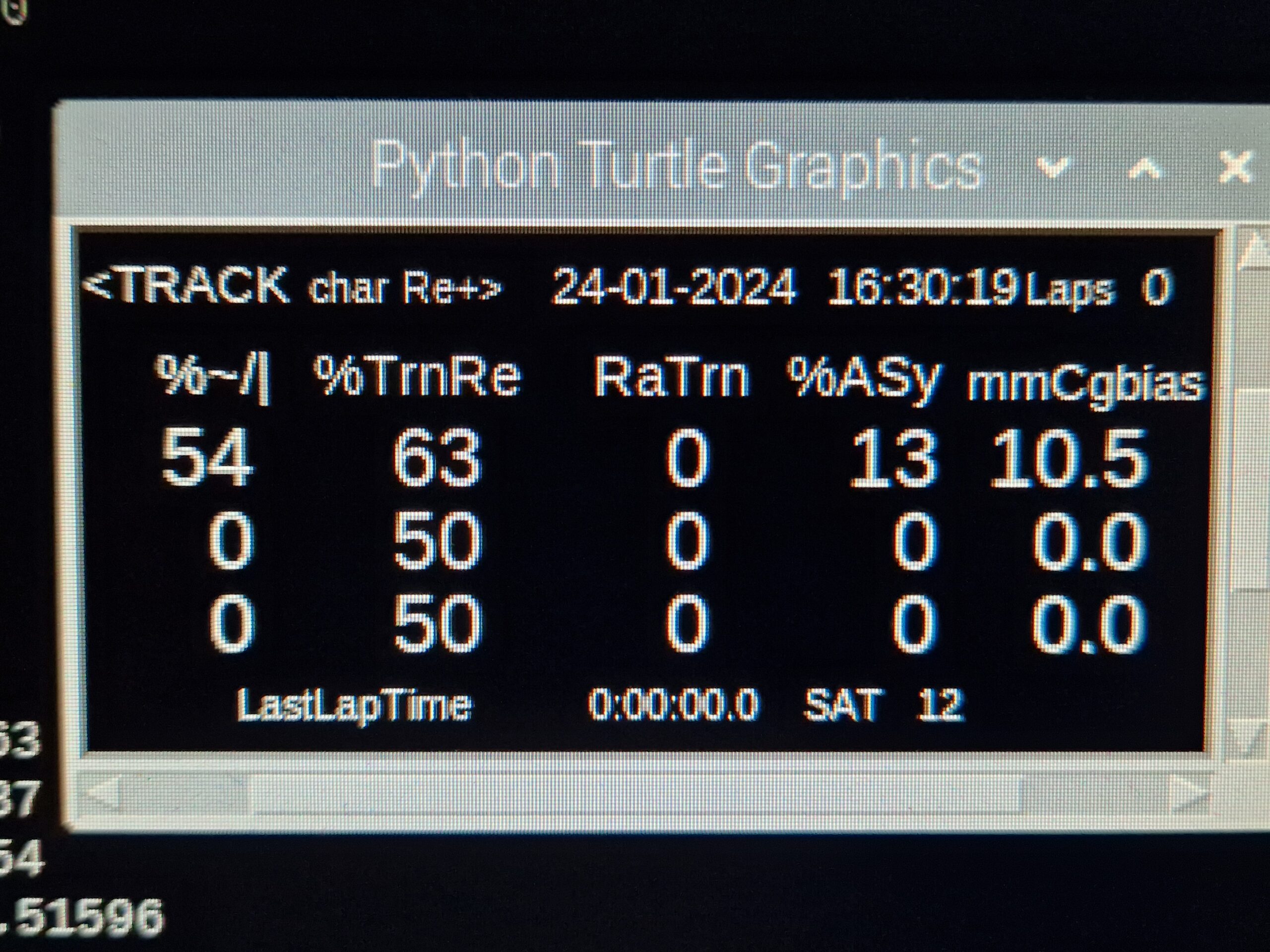
MMCOGBIAS
(B) BIAS correctie in mm van het COG punt
(C) Herberekening van het centrale gewichtscentrum [COG] van de kart
VERSCHIL TUSSEN EEN SYMMETRISCHE EN ASYMMETRISCHE KARTAFSTELLING
3X GRAFIEK met LINKS<>RECHTS GFORCE RECORDS
Met een Symmetrisch (grafiek1) versus Asymmetrisch (grafiek2,3) afgestelde kart.
LIVE GFORCE RECORDS "CIRCUIT ADRIA"
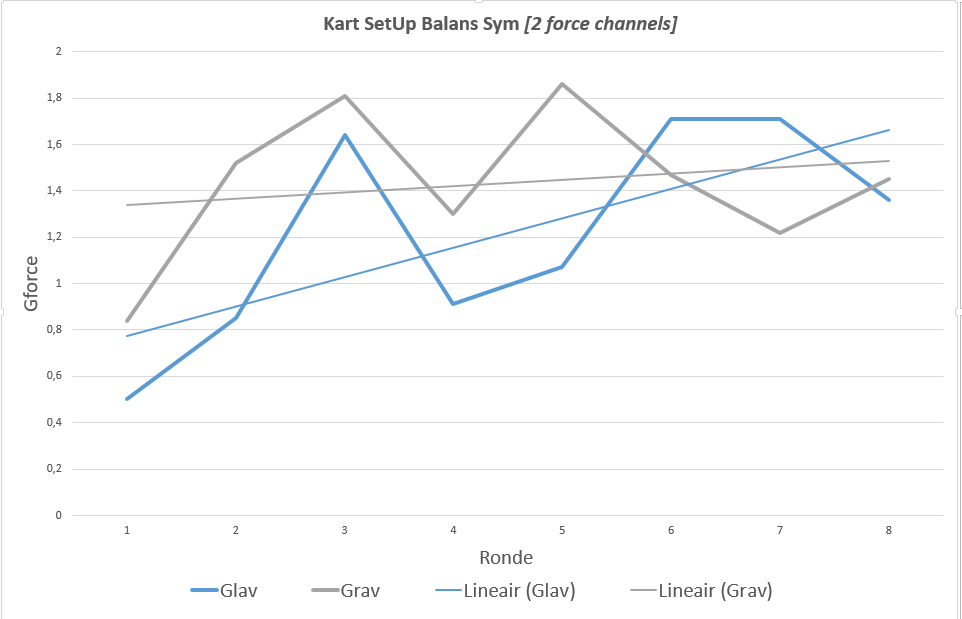
[Grijze lijnen] GFORCE on RIGHT corners per lap
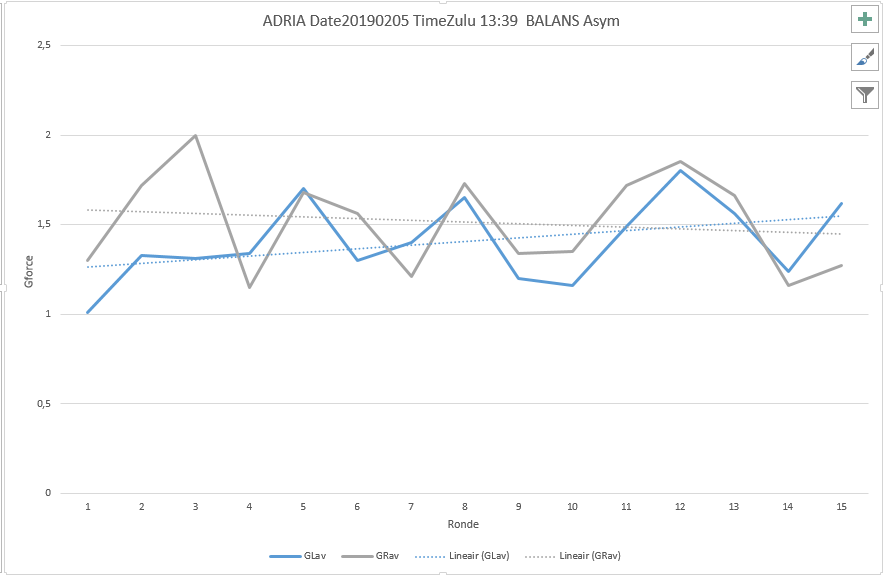
You see influence on the weight transfer
The result Gforces L<>R are closer together
DE SNELSTE KARTAFSTELLING OF SETUP:IS DE MAXIMAAL INTEGRAAL BEREKENDE G-FORCE [SOM L+R] PER STIND
UITGANGSPUNT BIJ LAGERE GRIP LEVELS
BRENG DOOR G-FORCE METING PER KARTZIJDE
HET G-FORCE LEVEL MET DE HOOGSTE WAARDE OVER
NAAR DE KART ZIJDE MET HET LAAGSTE G-FORCE LEVEL
VOORDEEL
HOGER GEMIDDELD GFORCE LEVEL PER RONDE
HOGERE GEMIDDELDE BOCHTSNELHEID PER RONDE
VERBETERDE GFORCE BALANS
VERBETERDE GFORCE BALANS
UITGANGSPUNT BIJ HOGERE GRIP LEVELS
STEL DE KART AF OP DE JUISTE GEWICHTSBALANS
DENK AAN EEN LAAG EN KOMPAKT ZWAARTEPUNT (COG)
MET KLEINERE HOEKEN IN DE KRACHTVECTOREN RICHTING DE BANDEN
VOORDEEL
HOGER GEMIDDELD GFORCE LEVEL PER RONDE
HOGERE GEMIDDELDE BOCHTSNELHEID PER RONDE
VERBETERDE STABALITEIT
VERBETERDE STABALITEIT
Straight-line-acceleration-deceleration per ronde
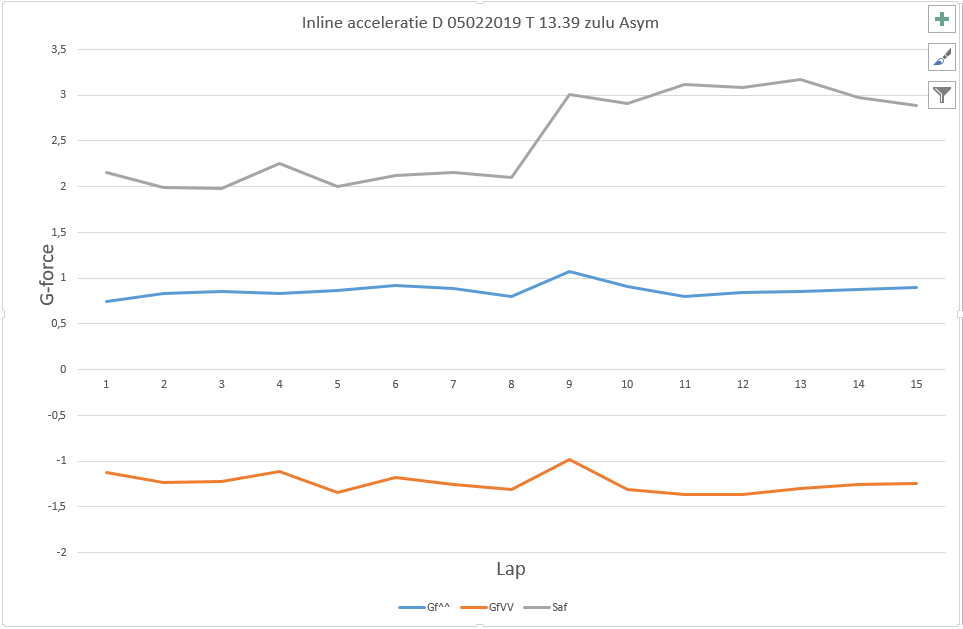
[Oranje lijn] break results (-)GFORCE
De meetgegevens van alle bovenstaande grafieken zijn vastgelegd op:
onderstaand circuit
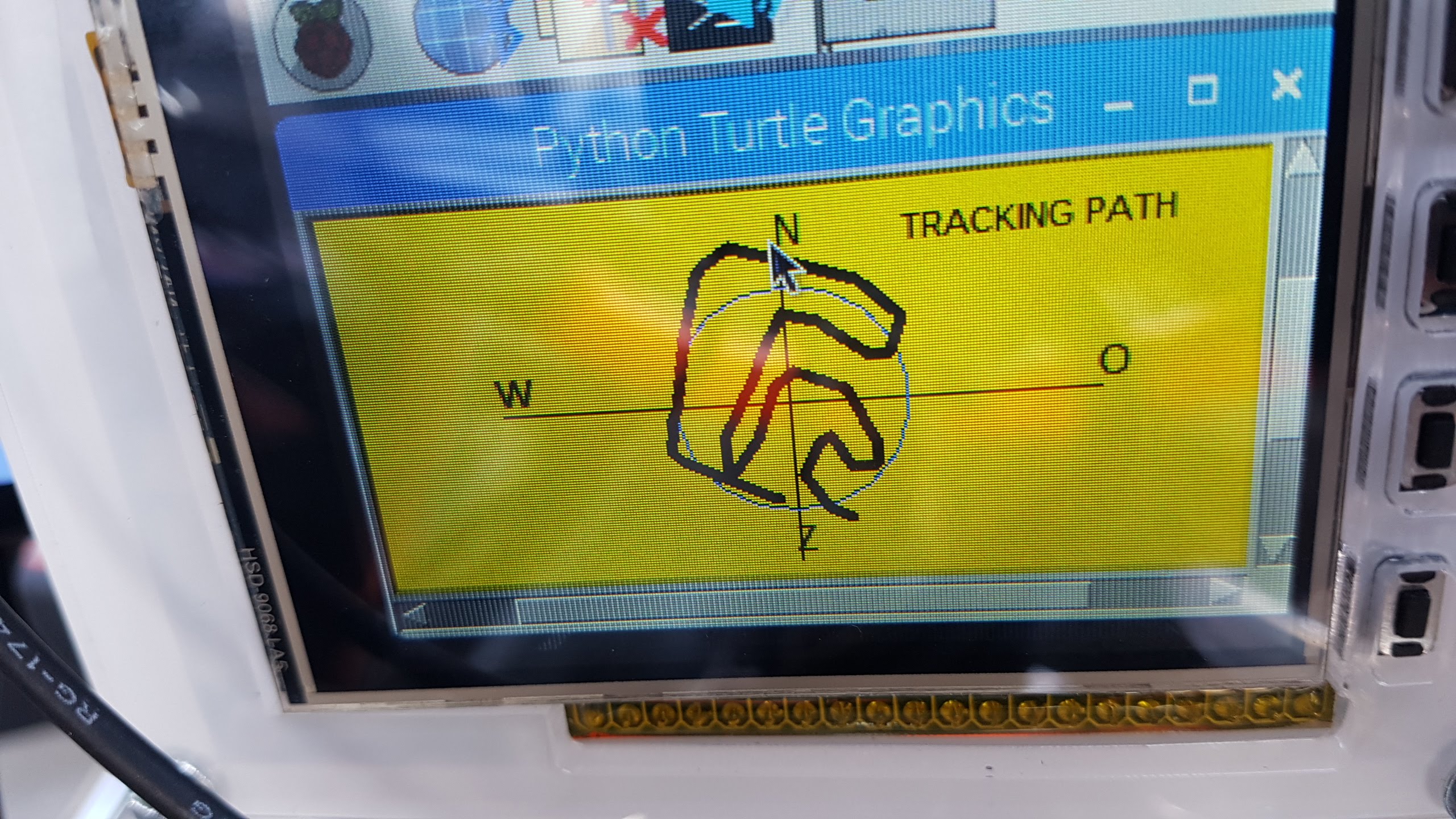
Adria international Raceway
Circuit tracking_pathFactor_asymmetrisch 15%
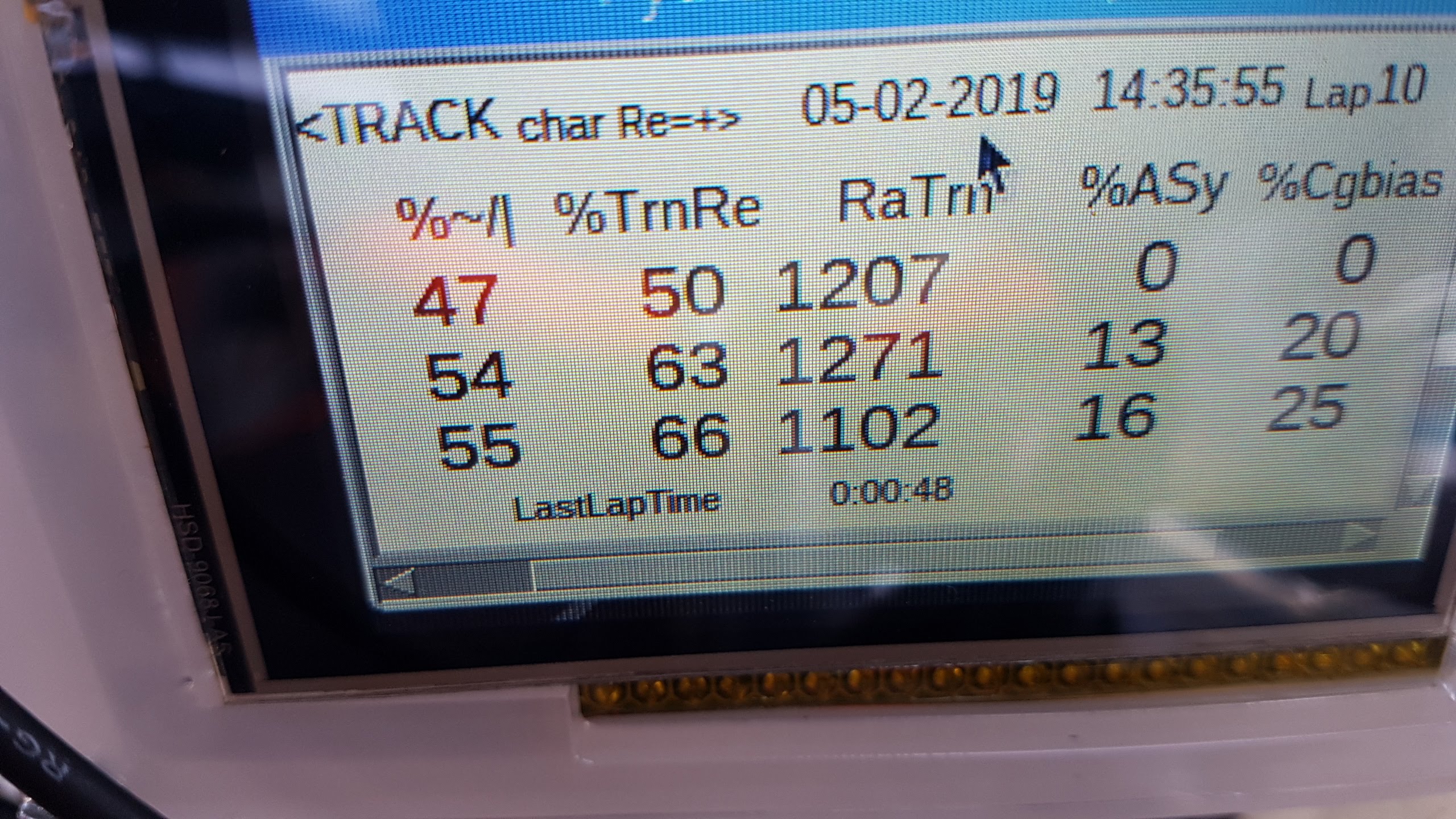
Adria international Raceway
Track geometrie-monitorFactor_asymmetrisch 13-16%
RACE DYNAMICS
IN SUMMARY

Rijdend on track Staat op ieder massapunt in twee richtingen gewicht te werken Dit wordt verticale en horizontale load genoemd
Verticaal gericht is het gewicht W door gravitatie ook wel load genoemd
Horizontaal gericht is delta W deze wordt load transfer genoemd

Formules
Ay==lateral acc. in G
W==weight in KgF
WR==vertical load on right tyre
F=-W*Ay
W*Ay*h-WR*t+W*t/2=0 (som vd momenten is 0)
WR*t=W*t/2+W*Ay*h(h==height)
WR=W/2+W*Ay*h*t/2
WR=W/2+[Delta W]
[Delta W]=W*Ay*h/t
Formules Milliken&Milliken
Kart
Static / Dynamic
SetUp
Resumerend
Ten behoeve van het dynamisch balanceren van kart-rijder combinaties met het on-board-analyse-device dienen de positioneringen van alle massa-delen voldoende gespecificeerd te zijn. Deze massa-positioneringen worden bepaald met behulp van een weegbrug. Dit in combinatie met een simulatie-programma kunnen de afstellingen ingesteld/geoptimaliseerd worden.
Deze 2D naar 3D balanceer-methode geeft meer inzicht in:
- berekening van de symmetrie van de invalshoeken vanuit ieder separaat massadeel naar de banden
- hierdoor ontstaat inzicht op de symmetrische verdeling van de krachtvectoren op de kartbanden ter linker en rechterzijde van de kart [load]
- met behulp van simulatie kun je de juiste kart-afstelling en balans inregelen d.m.v. herverdeling van de positionering van de massa
-ook is de krachtverdeling van de massa via het frame en de bijbehorende flex naar de wielen tot in de bandvlakken op het asfalt te volgen en naar behoefte te simuleren voor optimalisatie
Belangrijk elementen zijn verder nog:
- het rol-moment: verlaging of verhoging van het rol-moment, inherent aan de karakteristieken van de kartbaan en niet te vergeten de grip [denk aan opbouw of afbouw van de hoeveelheid grip..bite..hopping..sliding etc]
- simulatie van de meest optimale bandendrukken voor een thermische balans en contact-vlak-verdeling van de banden- bovendien geeft het track-kart-balance-systeem ook info over de snelheid, straight-line-acceleration,braking deceleration, track-altitude en GPS-laptime