KART AFSTELLEN - GFORCE BALANS - SIMULATIE
WELKOM BIJ KARTAFSTELLEN.NL | ENSCHEDE
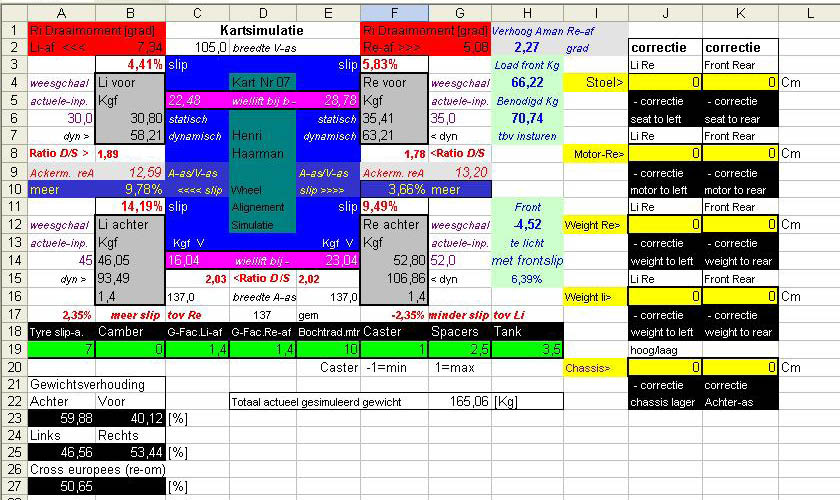
SIMULATIE V.D. GEWICHTSVERDELING
MASSA IN COMBINATIE MET GFORCE is altijd aanwezig op de kart
Denk aan zwaartekracht en centrifugaalkracht en de combinaties hieruit!!!
Centrifugaalkracht is in richting en verdeling naar alle bandcontactvlakken te simuleren
Dit is een enorme tool voor het afstellen en de setup van de kart.
Deze informatie gaat naar wiskundige modellen die rekening houden met verschillende variabelen zoals de spoorbreedte, de hoogte, het caster, de ackerman instelling enz.
UITLIJNEN / GFORCE VERDELING
GESPLITSTE GFORCE vanuit de kart is in LINKS RECHTS VERDELING L<>R naar alle bandcontactvlakken te simuleren met deze tool
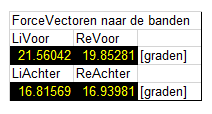
HOEKEN V.D. KRACHTVECTOREN
BRENGEN DE BALANS V.D. KART HEEL SNEL IN BEELD
DIT GEEFT DE JUISTE RICHTING TIJDENS HET SIMULATIEPROCES VAN POSITIONEREN VAN GEWICHT OP DE KART
BASIS AFSTELLING V.H. SIMULATIEMODEL = 100% BALANS = 100% SYMMETRISCH = 2D is balanceren op de weegbrug.
KART DYNAMISCH BALANCEREN = VECTOR KART ON TRACK BALANCE met de GPS-GFORCE-TRACK-BALANCE-COMPUTER = 3D Dit is het balanceren van gewicht inclusief de werking v.d. gemeten G-FORCES op de TRACK.
SIMULEREN V.D. KART IS MOGELIJK MET:
- TRACK-BREEDTE'S
- CASTER
- CAMBER
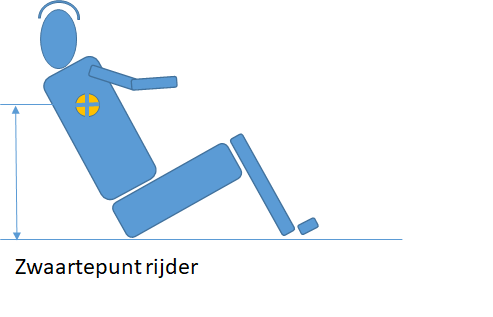
- HOOGTE'S MASSA
- MASSA VERDELING
- BANDENDRUKKEN
- VEERCONSTANTEN PER WIEL
- BAND-CONTACT-OPPERVLAKKEN
- LOAD-VECTOR-HOEK NAAR DE BANDEN
- GFORCE [TRACK-DATA]
- BOCHTENRADI [TRACK-DATA]
Ook met eventueel BALLAST-gewicht kan dit simulatiesysteem uit de voeten en de meest optimale symmetrische afstelling bepalen.
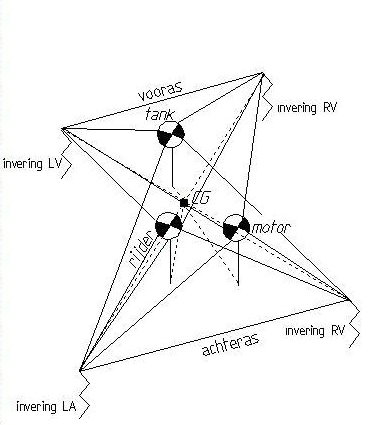
2D & 3D: LOAD SIMULATIE
GEPROJECTEERD OP 4 KARTWIELEN
DOEL IS 100% SYMMETRIE & BALANS
DIT GEGEVEN IS GERELATEERD AAN DE HOEVEELHEID LOAD C.Q. GRIP VAN DE KART
DE KART MOET DAAROM MOGELIJK OPNIEUW AFGESTELD WORDEN (FINE TUNING) NAARMATE DE GRIP EN HIERDOOR DE G-FORCE VERANDERT
LOAD & UN-LOAD V.D. KARTWIELEN
Samen met de simulatie-instellingen in beeld gebracht
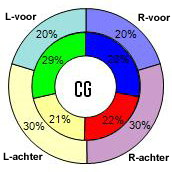
Resultaat van de balans na simulatie
Simulatie resultaat
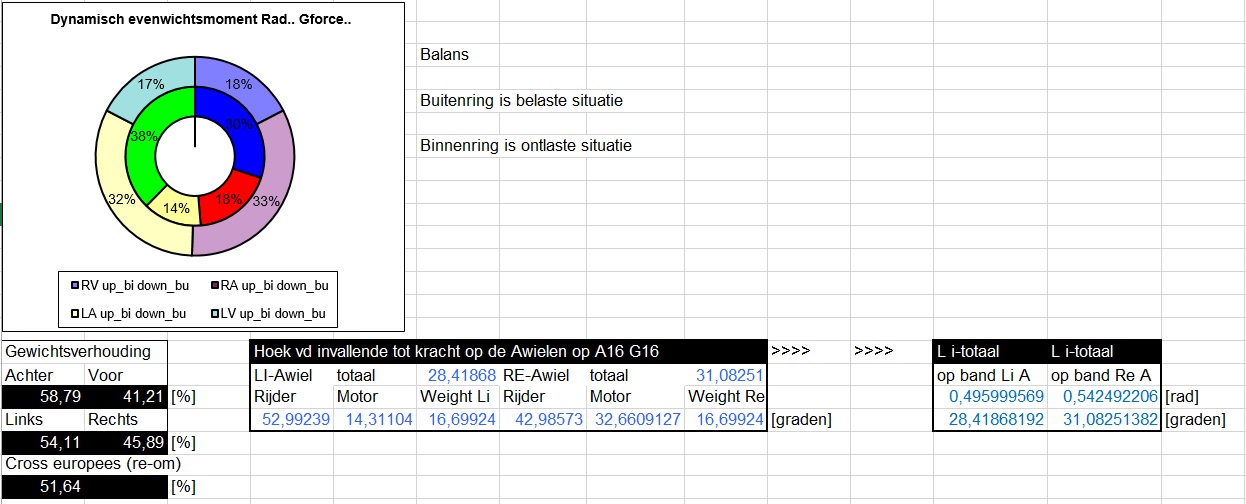
BALANS RINGEN
-BUITEN-RING: is gesimuleerd resultaat van de LOAD in % op de KARTWIELEN aan de NIET belaste kart binnenzijde
-BINNEN-RING: is gesimuleerd resultaat van de LOAD in % op de KARTWIELEN aan de belaste kart buitenzijde
BALANS OPTIMALISATIE SIMULATIE
BELANGRIJK IN DE KART AFSTELLING:
Het BELASTE gewicht op de BINNEN-RING moet van de voorwielen groter zijn dan het ONTLASTE gewicht op de BUITEN-RING van de achterwielen
Dit is een kruislings verband.
-We simuleren nu m.b.v. deze tool de via werkelijke gemeten waarden van massa, positie van massa op de kart (Fase1 meting)en de G-Forces(Fase2 meting) die werken op deze massa
-De gehele voorwiel-geometrie staat geprogrammeerd in de simulatiesoftware
-Goed zichtbaar is de transitie van de load van de achter-as naar de voor-as in een bocht, wat mede veroorzaakt wordt door het caster in de voorwiel geometrie
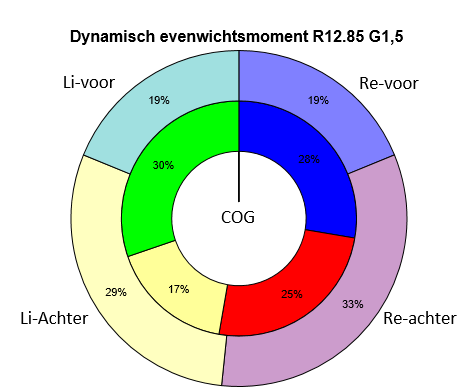
Resultaat van de balans na simulatie met 1.5G
Simulatie resultaat met 1.5G
SIMULATIE MET HOGE GFORCE (1.5G)
SIMULATIE: G-KRACHTEN NU 1.5 G
LET OP BALANS V.D. KART VERSCHUIFT HIERDOOR!
BALANS OPTIMALISATIE SIMULATIE
AANDACHTSPUNT IN DE KART AFSTELLING:
In verhouding te veel gewicht op het achterwiel-rechts-achter
Zie het rode vlak in de BINNENRING v.d. ringgrafiek t.o.v. geel kleurig vlak van achterwiel-links-achter eveneens op de BINNENRING
We hebben het nu zichtbaar gemaakt dat de ACHTER-AS behoorlijk uit BALANS is naarmate de G-krachten toenemen.
BALANS OPTIMALISATIE SIMULATIE
AANDACHTSPUNT IN DE KART AFSTELLING:
CW=(RF+LR)/TOTAL#(LF+RR)/TOTAL
OPTIMALISATIE IS MOGELIJK
TWEE METHODES:
(1) HERPOSITIONERING VAN GEWICHT boven de achter-as
(2)Aanpassing in de spoorbreedte op LINKER- en RECHTERZIJDE v.d. kart
- Van 2D naar 3D meet- en rekensysteem
- Hoogteligging van massadelen geeft een dynamisch load to tire verschil en wordt per definitie niet meegenomen met een 2D weegbrug meting
- Hierdoor ontstaat er verschil in balans prestaties van de kart tussen een 2D en een 3D afstelling
- Dit verschil kan via 3D BALANCING in evenwicht worden gebracht
- De GPS-GFORCE-TRACK-BALANCE-COMPUTER berekent vervolgens doorlopend de meest optimale CORRELATIE tussen de kart en de track
- Dit is dan de [FASE 1 + 2] = optimale afstelling